сателита, у Земљиној орбити.

Глобални позициони систем – GPS (ен. Global Positioning System - GPS) је тренутно једини потпуно функционалан сателитски навигациони систем, свима доступан. GPS се састоји од 24 сателита, распоређених у орбити Земље, који емитују навигационе радио сигнале. На основу ових радио сигнала GPS пријемници могу да одреде своју тачну позицију - надморску висину, географску ширину и географску дужину - на било ком месту на планети Земљи, дању и ноћу, при свим временским условима.
То омогућава пријемнику почетак читања у трајању од 20 милисекунди дужине бајтова навигационе поруке. Сваки подоквир навигационог оквира почиње са телеметријском речи која омогућава пријемнику детекцију почетка подоквира и детерминисање времена на часовнику пријемника када почиње навигациони подоквир. Сваки подоквир навигационог оквира такође је идентификован бајтовима у прекопчаној речи (HOW, ен. handover word) што омогућава пријемнику детерминисања подоквира.
GPS има велику примену као глобални сервис у свим комерцијалним, безбедносним и научним наменама: навигацији на мору, Земљи и у ваздушном простору, дигиталном мапирању земљишта, прављењу географских карата, одређивању тачног времена, откривању земљотреса, атомских експлозија и слично.
GPS је развијен од стране Америчког Министарства одбране под именом NAVSTAR GPS у агенцији DARPA. Неки извори наводе да је NAVSTAR акроним од енг Navigation Signal Timing and Ranging GPS, док други наводе да је то случајно изабрано звучно име дато од стране Јохн Валсх - а, особе која је имала кључну улогу о одлучивању о судбини пројекта.
У почетку је GPS био заштићен и коришћен искључиво у безбедносно војне сврхе, да би касније био бесплатно стављен на располагање свима становницима планете Земље, као јавно добро. Годишњи трошкови одржавања система су око 750 милиона америчких долара.
Хронологија развоја и модернизацијe GPS-a
- Централна лабораторија америчке војске за испитивање инерцијалне навигације објеката 1972. године, спроводи развојна летна испитивања два прототипа GPS пријемника, користећи земаљске псеудо-сателите.
- Први експериментални блок GPS сателита, лансиран је 1978. године.
- Након што је совјетски пресретачки авион оборио цивилни корејски авион, који је залутао у забрањени ваздушни простор, због навигационе грешке, убијајући свих 269 путника, амерички Предсједник Роналд Реган је 1983. годнине најавио да ће GPS бити доступан за цивилне сврхе, кад буде спреман за такву улогу.
- До 1985. године, покренуто је више од десет комплета експерименталног сателита Блок-I, у функцији провере концепта. Управљање и надгледање тих сателита су се преселили из Онизука AFS, CA и предат је 2. сателитској командној ескадрили (2SCS), која се налази у ваздухопловној станици Фалкон у Колорадо Спрингсу, Колорадо.
- Први модерни сателит Блок-II, лансиран је 14. фебруара 1989. године.
- Заливски рат, од 1990. до 1991. године, први је сукоб у којем је GPS био у широкој оперативној употреби.
| Блок | Период лансирања | Лансирани сателити | Тренутно исправни у орбити | |||
|---|---|---|---|---|---|---|
| Успешан | Отказао | У припреми | План | |||
| I | 1978–1985 | 10 | 1 | 0 | 0 | 0 |
| II | 1989–1990 | 9 | 0 | 0 | 0 | 0 |
| IIA | 1990–1997 | 19 | 0 | 0 | 0 | 9 |
| IIR | 1997–2004 | 12 | 1 | 0 | 0 | 12 |
| IIR-M | 2005–2009 | 8 | 0 | 0 | 0 | 7 |
| IIF | од 2010 | 5 | 0 | 7 | 0 | 5 |
| IIIA | од 2014 | 0 | 0 | 0 | 12 | 0 |
| IIIB | — | 0 | 0 | 0 | 8 | 0 |
| IIIC | — | 0 | 0 | 0 | 16 | 0 |
| Укупно | 62 | 2 | 7 | 36 | 32 | |
- Први систем, пустио је у оперативну употребу 2. свемирски пук. Он је деактивиран 1992. године, а замењен је са 50. свемирским пуком.
- До децембра 1993. године, GPS постиже почетну оперативну способност (IOC), што испуњава потпуну консталацију од 24 сателита, који су на располагању и пружају жељени стандард употребе (ен. Standard Positioning Service ) (SPS).
- Пуна оперативна способност (FOC) проглашена је од стране команде ваздухопловства за свемир (AFSPC), у априлу 1995. године, означавајући тиме потпуну доступност сигурне и прецизно позиционирање (PPS) за војне потребе.
- Препознајући важност GPS за цивилне кориснике, као и за војне, амерички Председник Бил Клинтон је 1996. године, издао директиву да GPS буде систем двоструке намене и да се сагласно томе интегрише. Да га води извршни одбор као национално средство.
- Амерички Потпредседник Ал Гор је у 1998. години, најавио планове за надоградњу GPS-а са два нова цивилна сигнала за побољшану тачност и поузданост, нарочито у погледу ваздухопловне безбедности и у 2000. години, Конгрес САД-а је одобрио те радове, називајући варијанту као GPS III.
- Обустављена је уредба, 2. маја, 2000. године, о „селективној расположивости“ из 1996. омогућавајући тако свима корисницима да добију не-деградирани глобални сигнал о позицији.
- Влада Сједињених Држава је потписала споразум 2004. године, о оснивању сарадње са Европом, која се односи на GPS и систем Галилео који је планиран у Европи.
- Амерички Председник Џорџ Буш, ажурирајући националну политику 2004. године, заменио је извршни одбор са Националним извршним одбором за васиону - позиционирање, навигацију, и време.
- Обелодањени су успешни резултати испитивања преноса сигнала GPS за мобилне телефоне, у новембру 2004. године.
- Први модернизовани, GPS сателит је лансиран у 2005. години и почео је пренос цивилних сигнала (L2C) са побољшаним перформансама за кориснике.
- Застарели главни рачунар компаније, заснован на земаљским сегментима управљачког система, планиран је за прелазак на нови развој архитектуре, 14. септембра 2007. године.
- Америчка Влада је својим извештајем, од 19. маја 2009. године, упозорила да неки GPS сателити неће бити функционални 2010.
- Ваздухопловна свемирска команда је, 21. маја 2009. године, саопштила страховање да неки системи GPS могу да откажу и да постоји ризик њиховог испуњења радног стандарда.
- Ажурирање теренских контролних система, 11. јануара 2010. године, изазвало је некомпатибилност софтвера са 8.000 на 10.000 војним пријемника.
- Америчком ваздухопловству је додељен уговор, 25. фебруара 2010. године, да развије оперативни систем GPS-а наредне генерације управљања (OCX), са побољшањем тачности и доступности GPS навигационих сигнала, а да буде уједно и као огледни део GPS модернизације.
- GPS сателит је лансиран 28. маја, 2010. године. Најстарији је GPS сателит који је и даље у раду, покренут је 26. новембра 1990. године, а постао је оперативан 10. децембра 1990.
- GPS сателит, GPS IIF-2, лансиран је 16. јула 2011. године, у свемирској бази 37B.
- GPS сателит, GPS IIF-3, је лансиран 4. октобра 2012. године, у свемирској бази 37B.
- GPS сателит, GPS IIF-4, лансиран је 15. маја 2013. године, у свемирској бази 41.
Основни принцип рада
Пријемни уређај GPS-а прорачунава своју позицију на основу добијених сигнала прецизно измереног времена, послатог од већег броја GPS сателита, са велике висине изнад Земље. Сваки сателит понаособ стално емитује поруке које укључују:
- време слања поруке (сигнала) и
- његову позицију, у време преноса поруке.
Систем садржи најмање три GPS сателита, сваки од њих понаособ емитује микроталасну секвенцу радио сигнала која је препознатљива на пријемнику. Док пријемник прима тај сигнал, у стању је да одреди дужину времена његовог путовања од сателита до пријемника, који се налази на тренутној позицији. Удаљеност од сателитског пријемника се лако израчунава на основу дужине времена и познате брзине простирања радио сигнала (брзина светлости). Без обзира на којој је позицији пријемник, од сваког сателита, он се налази на сферним површинама преноса радио сигнала од њих свих понаособ, пошто се они сферно емитују од тачке извора (са сателита). Пошто се сигнали сферно простиру са више сателита на различитим позицијама, пријемник се истовремено налази на сферним површинама сигнала од сваког сателита појединачно, што значи у њиховој тачки пресецања (погледај доње илустрације пресецања сферних површина). Сферне површине сваког сателита су специфичних димензија у зависности од познатог центра кружења сваког од њих. На основу познатих тих података, позната је позиција сваког од три сателита и на основу удаљености пријемника од сваког од њих, процесом трилатерације може се тачно одредити позиција пријемника у простору (ако се занемаре грешке). Ова растојања и позиције сателита се користе за израчунавање локације пријемника помоћу навигационих једначина. Добијена локација се тада графички прикаже, може на екрану на којем се креће мапа или дигитални подаци о географској ширини и дужини, а могу бити укључене и информације о висини.

Коригују се да би се секле у истој тачки.
Већина GPS јединица може аутоматски извући брзину и смер кретања од два или више мерења свог положаја. Недостатак овог принципа је да се промене у брзини или смеру рачунају са одређеним кашњењем и да изведени правац постаје непрецизан када је растојање између два суседна мерења промене положаја близу реда величине случајне грешке. GPS јединица може користити мерење Доплеровог помака сигнала, примљеног за израчунавање тачне брзине кретања. Многи напредни навигациони системи користе додатне сензоре (даваче) и уређаје попут компаса или су комбинација GPS и инерцијалног навигационог система.
У типичним GPS операцијама, четири или више сателита су убедљиви за добијање прецизних резултата. Четири сферне површине обично се међусобно не секу у једној тачки.* Због тога, може се са сигурношћу рећи да када се пронађу пресеци, са решењем навигационих једначина, добијено решење даје позицију пријемника заједно са разликом између времена на часовнику на плочи пријемника и стварног дневног времена, чиме се елиминише потреба за веома великим, скупим часовницима, а и великим потрошачима снаге. Веома прецизно израчунато време се користи само за приказивање или се уопште не користи у многим GPS применама које користе само одређивање локације. Бројни захтеви за GPS не искористи ово јефтино и прецизно мерење времена. Ово укључује пренос времена, сигнала времена у саобраћају и синхронизацију базних станица мобилних телефона.
Иако су четири сателита потребни за нормалан рад, мање се примењују у посебним случајевима. Ако је једна променљива већ позната, пријемник може одредити свој положај користећи само три сателита. На пример, авиону је можда позната висина. Неки GPS пријемници могу користити додатне трагове или претпоставке као што су поновно коришћење последње познате висине, инерцијалне навигационе податке или укључујући информације од рачунара возила, иако вероватно дају деградиран положај у односу на случај употребе четири сателита.
Принцип рада подразумева постојање и часовника на свим сателитима, као и на пријемницима, који су потпуно синхронизовани са временском разликом између познате секвенце сигнала сателита и пријемника што се тачно мери. На сателитима су атомски часовници, веома прецизни и скупи. Међутим, пријемник GPS-а има далеко мање прецизан часовник, поседује кристални осцилатор. Недостатак прецизности се решава увођењем мерења удаљености од још једног допунског сателита. Часовник на пријемнику уводи исту временску и просторну грешку приликом рачунања удаљености од сва четири сателита. Може се израчунати за колико треба кориговати часовник да би се четири сфере секле у једној заједничкој тачки. На тај начин се часовник на пријемнику GPS-а непрекидно коригује. На овај начин је једна од примена GPS-a и веома прецизно одређивање времена и синхронизација часовника.
Технички опис система
Савремени GPS се састоји од три главна подсистема (сегмента). То су космички (SS), командни (CS) и кориснички сегмент (US). Америчко ратно ваздухопловство развија, одржава и управља са ова два заједничка сегмента система GPS. GPS сателити емитују сигнале из свемира, а сваки GPS пријемник користи ове сигнале за израчунавање свога положаја у простору са три величине (географска ширина, дужина и висина) и тренутно време.
Космички сегмент (подсистем), састоји се од 24 до 32 сателита у орбити око Земље, а такође укључује корисничке адаптере за покретаче потребне да их лансира у орбиту. Сегмент за управљање се састоји од главне управљачке станице, резерве главној управљачкој станици и мноштву наменских и заједничких земаљских антена и приказивача у станицама. Кориснички сегмент се састоји од више стотина хиљада америчких и савезничких војних корисника за поуздано и прецизно позиционирање GPS корисника, а на десетине милиона државних, привредних, научних и приватних корисника за позиционирање.
Подсистем у васиони

Подсистем (сегмент) у васиони чини GPS сателит у орбити Земље. Број и распоред мреже тих GPS сателита се мења током времена у функцији њиховог развоја, исправности и сервисирања, а техничка решења су напредовала, зависно од технолошког развоја.
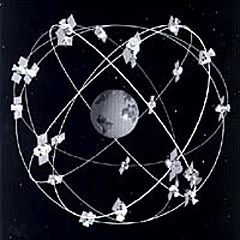
Оригинални концепт сателита Блок II представљају 24 GPS сателита који се крећу у 6 орбиталних равни (сфера), равномерно распоређених у односу на Земљу, које су нагнуте под углом од 55° у односу на екваторијалну раван. Орбиталне равни не ротирају у односу на удаљење звезде. У свакој орбиталној равни се крећу по четири сателита, по орбитама које су скоро кружне (ексцентричност елипсе 1°), међусобно правилно распоређени по кружници орбите, под углом од 90°. Пречник орбита је око четири пута већи од пречника Земље и сваки од сателита једном прође своју орбиту за 12 часова, тако да у односу на површину Земље сваки сателит сваког дана обиђе исту путању. Овај број и правилан распоред сателита гарантује да се са сваке тачке на Земљи у сваком тренутку на хоризонту налази бар по четири сателита. Та су четири сателита потребна за одређивање позиције GPS пријемника.
Пошто сателити повремено излазе из оперативне способности због одржавања, кварова или истека радног века, око Земље кружи више сателита и често их је са резервом активно више од 24. Понекад буде и 30 GPS сателита у оперативној функцији.
Контролни подсистем
Контролни подсистем (сегмент) чине станице за праћење сателита, контролне станице и земаљске антене. Станице за праћење сателита се налазе на Хавајима, Квајлин острву, Асенсионском острву, острву Дијего Гарсија и Колорадо Спрингсу, у Колораду. Улога ових станица је да прате кретање сателита, а податке шаљу главној контролној станици у Колорадо Спрингсу. Ту се врше прорачуни и преко земаљских антена које се налазе на Квајлин острву, Акнезијском острву, и острву Дијего Гарсија, шаљу се ажурирани подаци сателитима, о њиховој тачној позицији и времену. Исправка се прави два пута дневно, чиме се врше прецизна подешавања система. Новија генерација сателита је у стању да међусобно комуницира и међусобно синхронизује податке, те прецизност одређивања позиције не би била битно нарушена, ни кад би сателити данима радили независно од контролног подсистема са Земље.

простору ваздухопловног музеја.

Кориснички подсистем
Кориснички сегмент чине GPS пријемници на Земљи. Могу бити подсистеми укључени у друге системе (објекте), као нпр мобилни телефон, часовник и слично, или самостални. На пример, GPS пријемник базиран на SiRF Star III чипу, димензија само 12 х 15 mm. Други, самостални уређаји, имају плочу за приказивање позиције, брзине и / или времена и могу имати везу са другим уређајима.
Пријемник GPS-а сачињавају антена, подешена на фреквенцију GPS сателита, кристални осцилатор који служи као часовник и микропроцесор који обрађује сигнале. Пријемници се често карактеришу по томе колико имају канала. Сваки канал прати по један сателит. Старији типови су имали 4-5 канала, а данашњи углавном 12-20.
GPS пријемници могу имати у своме саставу и уређај који прима диференцијалне сигнале. Диференцијални сигнал се добија преко стандардног RS-232 преносника или преко интерне антене. Од 2006. године чак и јефтини пријемници укључују и пријемнике за обласне системе претраге.
Неки GPS пријемници комуницирају са другим уређајима преко серијских веза као што су USB, користећи стандардне протоколе. Широко распрострањени протоколи су NMEA 0183 и NMEA 2000. Иако су протоколи заштићени, објављено је довољно јавних докумената који их описују да се могу користити без кршења ауторских права. Постоје и други протоколи, као SiRF и MTK.
Навигација
Аспекти навигације обухватају навигационе сигнале и детаље о садржају порука. У оквиру те проблематике значајни су подаци о фреквенцијама одашиљача са његовог преносника одакле се шаљу поруке. Значајна је демодулација одашиљача и декодирање сигнала са сателита. Основне навигационе једначине описују геометрију сфере и фундаменталан концепт по којем порука од сателита путује брзином светлости, што се решава једнодимензионалним прорачунима. За детаљније изучавање и разумевање проблематике може помоћи мултидимензионални принцип, ен. Newton-Raphson, може бити интересантно за детаљније познавање записивања алгоритама.
Навигациони сигнали
Сваки сателит GPS-a континуално емитује навигацијске поруке брзином од 50 бита у секунди које садрже тачно време у току недеље, број GPS недеље и информацију о исправности сателита (све се емитује у првом делу поруке), дневне позиције планета (емитује се у другом делу поруке) и астрономски календар (последњи део поруке). Поруке се шаљу у оквирима. Емитовање сваког оквира траје 30 секунди, а започиње прецизно сваке минуте и пола минуте као што је назначено сателитским атомским сатом према сателитском формату поруке. Сваки оквир садржи 5 подоквира дугих 6 секунди са 300 бајтова. Сваки подоквир садржи 10 речи од по 30 бајтова и дугих од по 0,6 секунда.
Речи 1 и 2 сваког подоквира имају једнак тип података. Прва реч је телеметријска која означава почетак подоквира, а пријемник је користи за синхронизацију са навигационом поруком. Друга реч је прекорачење (ен. handover word ) HOW, која садржи временску информацију, што омогућава пријемнику идентификацију подоквира те одређује време слања следећег.
Речи 3-10 подоквира 1 садрже податке који описују сателитски часовник и његов однос према времену GPS-a. Речи 3-10 подоквира 2 и 3 садрже податке о дневној позицији планета те дају прецизну орбиту самог сателита. Дневна позиција планета се ажурира свака 2 сата, а уопштено је то актуелно 4 сата са могућношћу за исправке сваких 6 сати или нешто дуже у неноминалним условима. Време потребно за узимање података о дневној позицији планета постаје значајан елемент кашњења у фиксирању прве позиције, како хардвер постаје све моћнији, време потребно за закључавање сателитског сигнала скраћује се, а подаци о дневној позицији планета захтевају 30 секунди (у најгорем случају) пре него што се усвоје и то због ниског нивоа брзине преноса података.
Астрономски календар се састоји од грубе орбите и информација о статусу сваког сателита у консталацији, јоносферског модела те информације о односу GPS дела времена и координисаног универзалног времена (UTC). Речи 3-10 подоквира 4 и 5 садрже нови део астрономског календара. Сваки оквир садржи 1/25 астрономског календара па је потребно 12,5 минута за његово целокупно примање, само са једног сателита.
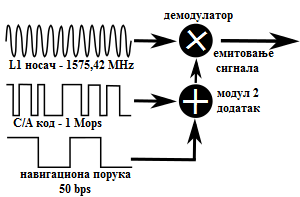
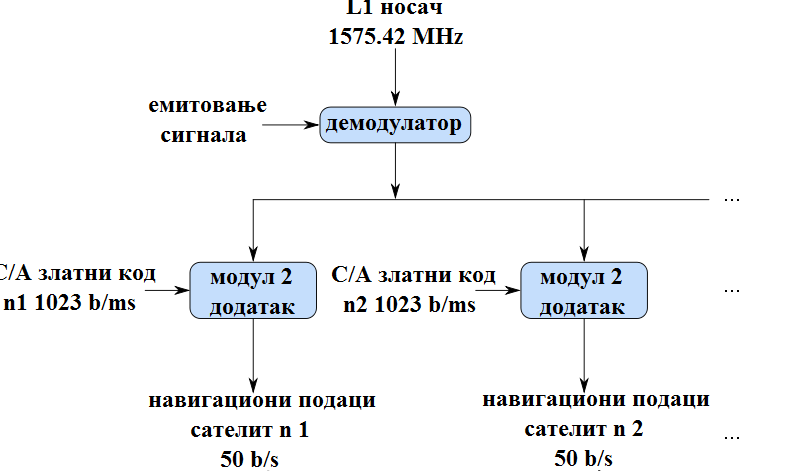
Астрономски календар служи за више намена. Прва је асистенција у аквизицији доступних сателита, омогућавајући пријемнику генерисање листе видљивих сателита базирано на погодној доступној позицији и времену, док је дневна позиција планета са сваког сателита потребна за израчунавање корекције позиције коришћеног. На старијем хардверу недостатак астрономских календара би у новим пријемницима изазвао дуже време чекања пре приказа ваљане позиције, јер је тражење сваког сателита спор процес. Напредак у хардверу учинио је процес аквизиције много бржим тако да одсутност астрономског календара више не представља проблем. Друга сврха се односи на време издвојено из GPS-a (тзв. GPS време) повезано с интернационалним временским стандардом UTC. Коначно, астрономски календар омогућава пријемнику с једном учестаношћу поправку јоносферске грешке коришћењем глобалног јоносферског модела. Корекције нису једнако поуздане као системи попут WAAS-a или пријемника са двема учестаностима. Но и то је често боље од никакве корекције јер јоносферна грешка је извор највеће грешке за GPS пријемнике са једном фреквенцијом. Важно је код навигационих података напоменути да сваки сателит не трансмитира само своје дневне позиције планета већ трансмитира астрономски календар за све сателите. Сви сателити емитују сигнале на две учестаности 1,57542 GHz (сигнал L1) и 1,2276 GHz (сигнал L2). Пријемник може препознати сигнале из различитих сателита јер GPS користи технику широког спектра названу многоструки приступ поделе кодова (CDMA) где су подаци поруке са ниским нивоом преноса кодирају псеудонасумичном (PRN) секвенцом високог нивоа која је различита за сваки сателит. Пријемник зна PRN кодове за сваки сателит па може то користити за реконструкцију актуелних података поруке. Подаци поруке се трансмитирају брзином од 50 бајтова у секунди. Користе се два различита CDMA кодирања: груби / аквизицијски (C/A) код (или тзв. златни код) на 1,023 милиона чипова у секунди, те прецизни (P) код на 10,23 милиона чипова у секунди. L1 давач је модулисан са оба кода, тј C/A и P кодом, док је L2 давач модулисан само P кодом. C/A код је јаван и користе га цивилни GPS пријемници, док P код може бити криптиран као тзв. P(Y) код, који је једино доступан војној опреми уз одговарајући декрипцијски кључ. Оба кода, C/A и P(Y), кориснику откривају прецизно дневно време.
Учестаности сигнала са сателита
- L1 (1575,42 MHz): спој навигационе поруке, грубог аквизицијског (C/A) кода и енкриптираног прецизног (P) кода плус нови L1C на будућим сателитима III.
- L2 (1227,60 MHz): P(Y) код плус нови L2C код блока IIR-M, на новијим сателитима.
- L3 (1381,05 MHz): користи се за садржај система за детекцију нуклеарних детонација (NUDET ен. NUDET Detection System) ради сигналне детекције нуклеарних детонација и осталих високоенергетских инфрацрвених догађаја. Користи се за контролу спровођења уговора о забрани нуклеарних испитивања.
- L4 (1379,913 MHz): проучава се за додатне јоносферне корекције.
- L5 (1176,45 MHz): предложен је за употребу за цивилни сигнал за безбедност животне средине (SoL ен. safety-of-life). Ова се учестаност налази у интернационалном заштићеном појасу за аеронаутичку навигацију што обећава малу или никакву интерференцију у свим околностима. Први сателит блока IIF који обезбеђуле овај сигнал лансиран је 2010. године.
C/A код
Демодулација и декодирање
Будући да су сви сателитски сигнали модулисаном на истој фреквенцији L1 преносника, потребно је одвојити сигнале након демодулације. То се ради додељивањем јединствене псеудонасумичне секвенције познате као златни код свакоме сателиту, а сигнали се декодирају након демодулације употребом модула 2, додатком златног кода који одговара сателитимаn1 до nk где је k број канала у GPS пријемнику а n1 до nk одговара псеудонасумичним бројевима који означавају сателите. Сваки сателитски идентификатор PRN-a је јединствен у распону од 1 до 32. Резултат тих додатака модула 2 јесу навигационе поруке од 50 бајта у секунди од сателита n1 све до nk. Златни кодови коришћени у GPS-у чине секвенце од 1.023 бајтова са периодом од 1 милисекунде. Златни кодови су наглашено узајамно правоугаони тако да је мало вероватно да ће се један сателитски сигнал погрешно заменити и објаснити с другим. Златни кодови такође имају добра аутокорелацијска својства.
Постоји 1.025 различитих златних кодова дужине 1.023 бајтова, но од свих њих користи се само 32. Ови златни кодови често се називају псеудонасумични шумови јер не садрже никакве податке и изгледају налик насумичним секвенцама. Но, то може заварати јер су они заправо детерминисане секвенције.
Ако су се информације о астрономском календару претходно прикупиле, пријемник бира које ће сателите ослушкивати према њиховим PRN-овима. Ако се информације о астрономском календару не налазе у меморији, пријемник улази у претраживачки мод и кружи кроз PRN бројеве све док се не забрави на једном од сателита. Да би се успео забравити, потребна је неометана „линија видљивости“ између пријемника и сателита. Пријемник затим може преузети астрономски календар и детерминисати сателите које ће ослушкивати. Пријемник детектује сваки сателитски сигнал тако што га идентификује према различитом обрасцу C/A кода.
Пријемник користи C/A златни код са истим бројем PRN као и сателит ради израчунавања помака О (енгл. offset) који генерише најбољу корелацију. Помак О се израчунава методом покушаја и грешке. Сателитски сигнал PRN од 1.023 бајта се упоређује са пријемниковим PRN сигналом. Ако се не постигне корелација, 1.023 бајта пријамниковог унутрашњег генерисаног PRN кода замењује се за један бајт у односу на сателитски PRN код, те се затим сигнали поново упоређују. Процес се понавља све док се не постигне корелација или се пробају сва могућа 1.023 случаја. Ако се пробају 1.023 случаја без постизања корелације, онда се фреквенцијски осцилатор помера на следећу вредност и процес се понавља.
Будући да се примљена учестаност преносника може разликовати због Допплер помака, тачке где почињу примљене PRN секвенце не морају се разликовати од О егзактним интегралним бројем милисекунди. Због овога се праћење учестаности преносника, заједно са праћењем PRN кода, може користити за детерминисање тренутка почетка примања сателитског PRN кода. За разлику од ранијих прорачуна помака, у којем је потенцијално требало пробати свих 1.023 помака, праћење одржавања забрављивања обично захтева замену на половину таласне дужине или мање. Како би извео ово праћење, пријемник прати две величине, фазну грешку и примљени помак учестаности. Корелација између примљеног PRN кода у односу на PRN код који генерише пријемник израчунава се због детерминисања провере јесу ли бајтови двају сигнала погрешно постављени. Поређење са корелацијом израчунатог PRN кода који генерише пријемник померањем половине ширине учестаности раније и половине ширине учестаности касније користе се за процену учесталости фазне грешке. Наредба за генератор учестаности и свако следеће потребно померање PRN кода израчунавају се као функција фазне грешке и учесталости фазне грешке у складу са коришћеним контролном законитошћу. Допплерска брзина се израчунава као функција помака учестаности у односу на номиналну преносникову. Она је компонента брзине дуж „линије видљивости“ пријемника у односу на сателит.
Како пријемник наставља читати сукцесивне PRN секвенце, наићи ће на изненадну промену у фази од 1.023 бајта примљеног PRN сигнала. То означава почетак бајта података о навигационој поруци. То омогућава пријемнику почетак читања у трајању од 20 милисекунди дужине бајтова навигационе поруке. Сваки подоквир навигационог оквира почиње са телеметријском речи која омогућава пријемнику детекцију почетка подоквира и детерминисање времена на часовнику пријемника када почиње навигациони подоквир. Сваки подоквир навигационог оквира такође је идентификован бајтовима у прекопчаној речи (HOW ен. handover word) што омогућава пријемнику детерминисања подоквира. Пре прве процене позиције може бити присутно одлагање највише до 30 секунди због потребе читања података о дневној позицији планета пре израчунавања пресека сферних површина.
Након што се подоквир прочита и интерпретира може се израчунати време слања следећег подоквира помоћу употребе податка о корекцији часовника и HOW-а. Пријемник поседује време свога часовника када је примљен следећи подоквир из детекције телеметријске речи која стога омогућава прорачун пролазног времена, па и псеудораспона. Пријемник је потенцијално способан да прикупи ново мерење псеудораспона на почетку сваког подоквира или сваких 6 секунди.
Затим се орбитални позициони подаци или дневна позиција планета из навигационе поруке користи за прецизан прорачун положаја где је сателит био на почетку поруке. Осетљивији пријемник потенцијално ће брже моћи да прикупи податке дневне позиције планета од мање осетљивог, посебно у окружењу са „буком“ (сметњама).
Процес се понавља за сваки сателит који пријемник ослушкује.
Методи навигационих прорачуна
Познавајући растојање GPS пријемника до сателита и позицију сателита имплицира се да је GPS пријемник смештен на површини сфере на центрираној позицији сателита. Стога знамо да је назначена позиција GPS пријемника на пресеку површина четири сфере или близу њега. У идеалном случају без грешака GPS пријемник налазиће се на пресеку површина четири сфере. Ако се површине две сфере секу у више од једне тачке, онда се оне секу по кружној линији. За потребе GPS-а искључује се нереални случај двеју индентичних сфера. Слика две сферне површине које се секу по кружној линији, приказана је доле ради илустрације случаја. Две тачке у којој се секу површине сфера јасно су назначене на слици. Удаљеност међу тим двема тачкама је пречник круга пресека. Уколико се и даље не види наведено, треба замислити како би изгледао бочни поглед на сфере које се секу. Тај би поглед требао изгледати једнако као на слици због симетрије две сфере. Заиста, поглед из било којег хоризонталног смера изгледа ће једнако. То би требало бити очигледна илустрација да се површине две сфере заиста секу у кругу. Трилатерација то јасно представља математички.
Развијено је више методе прорачуна позиције GPS пријемника и одступања часовника. Од свих њих две су најважније и то: (1) трилатерацијиследа коју проналажење једнодимензионалног нумеричког корена и (2) мултидимензионални Newton-Raphson метод.
- Пријемник може решити трилатерацију коју следи једнодимензионално нумеричко коренско проналажење. Ова метода користи трилатерацију за детерминисање интерсекције површина три сфере. У трилатерацији је јасно приказано да се површине три сфере секу у тачкама 0, 1 и 2. У обичном случају два пресека бира се решење које је најближе површини сфере која одговара четвртом сателиту. Уместо њега може се понекад користити површина Земље посебно у случају цивилних GPS пријемника јер је у Америци - илегално пратити возила (објекте) на висини изнад 60.000 стопа (18.000 m) висине. Одступање
 , рачуна се као функција удаљености од решења до површине сфере која одговара четвртом сателиту. Коришћењем ажурираног примљеног податка о времену базирано на овом одступању израчунавају се нове сфере те се процес понавља. Ово се понављање наставља све док растојање из ваљаног трилатерацијског решења није доста близу површини сфере која одговара четвртом сателиту. Предност ове методе лежи у томе што укључује једнодимензионално насупрот мултидимензионалном нумеричком проналажењу.
, рачуна се као функција удаљености од решења до површине сфере која одговара четвртом сателиту. Коришћењем ажурираног примљеног податка о времену базирано на овом одступању израчунавају се нове сфере те се процес понавља. Ово се понављање наставља све док растојање из ваљаног трилатерацијског решења није доста близу површини сфере која одговара четвртом сателиту. Предност ове методе лежи у томе што укључује једнодимензионално насупрот мултидимензионалном нумеричком проналажењу. - Пријемник може користити методу мултидимензионалног нумеричког коренског проналажења као што је Newton-Raphson метода. Линеаризација око апроксимативног решења, може бити
 од итерације k, затим решење четири линеарне једначине изведене из горњих квадратних једначина, како би се добило
од итерације k, затим решење четири линеарне једначине изведене из горњих квадратних једначина, како би се добило . Пречници су велики, тако да су сферне готово равне површине. Ова апроксимативна раван може утицати да итеративна процедура убразано конвергира у случају где је, јер у том случају је задатак само одредити пресек готово равних површина и стога се приближити линеарном проблему. Када се значајно мења, ова апроксимативна раван се не може искористити као предност у стварању брзе конвергенције јер ће се у том случају ове готово равне површине кретати како се сфере буду шириле или сужавале. Ова могућа брза конвергенција је предност ове методе. Такође се тврди како је ова метода типична, коју користе GPS пријемници. Недостатак ове методе мултидимензионалног коренског проналажења у поређењу са једнодимензионалним коријенским проналажењем лежи у томе да не постоји добра генерална метода за решавање система са више од једне нелинеарне једначине.
. Пречници су велики, тако да су сферне готово равне површине. Ова апроксимативна раван може утицати да итеративна процедура убразано конвергира у случају где је, јер у том случају је задатак само одредити пресек готово равних површина и стога се приближити линеарном проблему. Када се значајно мења, ова апроксимативна раван се не може искористити као предност у стварању брзе конвергенције јер ће се у том случају ове готово равне површине кретати како се сфере буду шириле или сужавале. Ова могућа брза конвергенција је предност ове методе. Такође се тврди како је ова метода типична, коју користе GPS пријемници. Недостатак ове методе мултидимензионалног коренског проналажења у поређењу са једнодимензионалним коријенским проналажењем лежи у томе да не постоји добра генерална метода за решавање система са више од једне нелинеарне једначине. - Остале методе укључују:
- Решавање пресека експандираних сигнала из светлосних конуса у 4-просторна конуса.
- Решавање пресека хиперболоида детерминисаних временском разликом сигнала примљених са сателита коришћењем мултилатерације.
- Када је доступно више од четири сателита, нужно је донети одлуку о томе хоће ли се користити само четири најбоља или више, уз узимање у обзир фактора попут броја канала, способности процесирања геометријске прецизности. Употреба више од 4 резултата у предетерминираном систему једначина без јединственог решења који се морају решити уз помоћ најмањих квадрата или сличне технике. Ако се користе сви видљиви сателити, резултати су једнако добри као они добијени са четири сателита, најчешће и бољи. Грешке у резултатима такође се могу проценити кроз остатке. Са сваком комбинацијом од четири или више сателита може се израчунати вектор стања позиције. Уколико се одабере више сателита, псеудораспони из комбинација од више од четири сателита могу се процесирати ради додавања више процена за локацију и часовно одступање. Пријемник затим детерминише које ће се комбинације користити, како ће се израчунати процењена позиција детерминисања просечних вредности тих позиција и сатних одступања. Након што се израчунају коначне локације и време, локација се изражава у специфичном координатном систему са геометријским подацима, геодетским датумом, временом или локалним системом специфичним за дотичну државу.
- Коначно, резултати из других позиционих система попут GLONASS-a или надолазећег Galilea навигацијски системи се могу користити у подешавању или за двоструку проверу резултата.
Једнодимензионални прорачун позиције
При описивању основног концепта како GPS пријемник ради у почетку се занемарују грешке. Употребом порука примљених са четири сателита, GPS пријемник може детерминисати сателитске позиције и време слања порука.
|
Компоненте позиције x, y и z, и време слања означени су као: |
|
Где су:
|
То је тако једноставно када се игноришу грешке. Напред је истакнуто да у типичним GPS операцијама четири или више сателита су убедљиви за добијање прецизних резултата.
Међутим, сложен је проблем како проценити поруку када су присутне грешке за које је усвојена ознака![]() која може бити између осталог и одступање часовника, пошто у оквиру пријемника одређено време касни. GPS пријемник има четири непознате вредности, три координате позиције GPS пријемника и показивање часовника
која може бити између осталог и одступање часовника, пошто у оквиру пријемника одређено време касни. GPS пријемник има четири непознате вредности, три координате позиције GPS пријемника и показивање часовника![]() .
.
Једначина дневних сферних површина:![]()
![]()
На основу предходног следи удаљеност:![]()
Мултидимензионални Newton-Raphson за GPS
Линеризоване једначине изведене су преко прикладних парцијалних дериватива (извода), уз описани алгоритам, што је приказано у предходном поглављу. Преписаће се последња једначина, која ће бити једна у разматраном скупу
![]() за
за![]()
Када се апроксимативно решење:![]() користи уместо егзактног:
користи уместо егзактног:![]() у једначини (1), тада је остатак
у једначини (1), тада је остатак![]()
Трансформацијом![]() добије се:
добије се:
![]()
Решење се нађе када је![]() једнако нули, или близу тога, за
једнако нули, или близу тога, за![]()
Због линеризације једначине (2), њени изводи су:




Где је:![]()
Линеризацијом десне стране једначине![]() око решења
око решења![]() добија се:
добија се:

Где је:![]() остатак због линеризације која је додатак остатку
остатак због линеризације која је додатак остатку![]() због апроксимативног решења.
због апроксимативног решења.
Како би се![]() приближило нули треба узети вредност
приближило нули треба узети вредност![]() тако да је:
тако да је:


Одаберу се вредности:![]() тако да се остатак
тако да се остатак![]() у једначини
у једначини![]() мења апроксимативно
мења апроксимативно
Промена трију компоненти позиције пријемника и времена, дефинисана је системом једначина:
Заменом![]() и сређивањем једначине добија се:
и сређивањем једначине добија се:

Систем![]() је скуп четири линеарне једначине, с четири непознате. Оне су у облику потребног решења. Употребом вредности
је скуп четири линеарне једначине, с четири непознате. Оне су у облику потребног решења. Употребом вредности
![]() и
и ![]() детерминисана решења, добијају облик:
детерминисана решења, добијају облик:![]()
Усвојена је употреба:
Постави се![]() у једначине
у једначине![]() до
до![]() издвоје се величине:
издвоје се величине:![]() из једначина
из једначина![]() у једначине
у једначине ![]() , постави се
, постави се![]() у једначине
у једначине![]() и коригујући остатке у једначинамa
и коригујући остатке у једначинамa![]() . Ова се процедура понавља све док се остаци потпуно не минимизирају.
. Ова се процедура понавља све док се остаци потпуно не минимизирају.
Анализа и фактори који уносе грешку
За израчунавање позиције пријемника користи се тачна позиција сателита и тачно време између емитовања и пријема сигнала . Пошто се то време установљава поређењем сигнала са сателита и интерног сигнала, у циљу поређења се идентификују подижуће и спуштајуће границе дигиталног сигнала, садашња електроника у то уноси непрецизност од око 10 наносекунди у C/A коду, што одговара грешци од 3m у мерењу удаљености. Када би позиција сателита и време часовника било апсолутно тачно, 3m би још увек била најмања грешка на коју треба рачунати. Пошто је дигитални сигнал P-кода бржи, грешка која се на овај начин уноси је мања и износи само 30 cm.
Остали извори непрецизности су атмосферски ефекти који утичу на брзину простирања радио - сигнала, вишеструке путање сигнала , непрецизност сателитских часовника, непрецизност података о позицији сателита, нумеричке грешке при израчунавању, брзина сателита и гравитација Земље. Када се сви ови фактори заједно узму у обзир и поред метода корекције, укупна грешка одређивања позиције је око 15m.
| Извори грешака | Ефекат (m) |
|---|---|
| Долазни сигнал C/A | ±3 |
| Долазни сигнал P(Y) | ±0.3 |
| Јоносферни ефекти | ±5 |
| Грешке дневне позиције планета | ±2.5 |
| Грешке сателитског сата | ±2 |
| Вишестазна дисторзија | ±1 |
| Тропосферски ефекти | ±0.5 |
| ±6.7 | |
| ±6.0 |
За употребу је приказан ниво грешке у табели, десно, (УЕРЕ ен. user equivalent range errors). Наведена је такође прорачунска грешка са процењеном вредношћу![]() од око 1 метра. Стандардна одступања
од око 1 метра. Стандардна одступања ![]() за грубу аквизицију и прецизни кодови су такође приказани у табели. Ова стандардна одступања су израчуната узимајући квадратни корен збира квадрата индивидуалних компоненти (тј RSS од енг. root sum squares) (корен збира квадрата). Како би се добила стандардно одступање процене позиције пријемника, ове се грешке опсега морају помножити одговарајућим фактором прецизности а затим применити RSS на прорачунску грешку. Грешке електронике су једна од озбиљних ефеката деградације тачности, а истакнуте су у табели. Када се узму заједно, аутономни цивилни GPS исправка хоризонталне позиције су типичне тачности у оквиру око 15 метара. Ови ефекти такође редукују прецизнију тачност P(Y) кодова. Напредак технологије значи да данашљи цивилни GPS имају просечну тачност од око 5 метара у хоризонталном смеру, под јасним правцем погледа сателит-пријемник. Употребљиве вредности грешака у функцији времена означава стандардно одступање компоненти грешака удаљености пријемника од сателита.
за грубу аквизицију и прецизни кодови су такође приказани у табели. Ова стандардна одступања су израчуната узимајући квадратни корен збира квадрата индивидуалних компоненти (тј RSS од енг. root sum squares) (корен збира квадрата). Како би се добила стандардно одступање процене позиције пријемника, ове се грешке опсега морају помножити одговарајућим фактором прецизности а затим применити RSS на прорачунску грешку. Грешке електронике су једна од озбиљних ефеката деградације тачности, а истакнуте су у табели. Када се узму заједно, аутономни цивилни GPS исправка хоризонталне позиције су типичне тачности у оквиру око 15 метара. Ови ефекти такође редукују прецизнију тачност P(Y) кодова. Напредак технологије значи да данашљи цивилни GPS имају просечну тачност од око 5 метара у хоризонталном смеру, под јасним правцем погледа сателит-пријемник. Употребљиве вредности грешака у функцији времена означава стандардно одступање компоненти грешака удаљености пријемника од сателита.
Стандардно одступање грешке положаја пријемника ![]() рачуна се множењем PDOP-а (енг. Position Dilution Of Precision) са
рачуна се множењем PDOP-а (енг. Position Dilution Of Precision) са ![]() ,стандардним одступањем употребљивих вредности грешака.
,стандардним одступањем употребљивих вредности грешака.![]() се рачуна квадратним кореновањем збира квадрата стандардних одступања појединачне компоненте.
се рачуна квадратним кореновањем збира квадрата стандардних одступања појединачне компоненте.
PDOP се рачуна као функција положаја пријемника и сателита. Разматрањем јединичног вектора, усмереног од пријемника према сателитима и спајањем ових резултата добија се ''тетраедар''. PDOP се понекад апроксимира као обрнуто пропорционална вредност од запремине ''тетраедара''. Понекад се апроксимира као обрнуто пропорционална вредност од запремине тетраедара.
![]() за C/A код дат је изразом:
за C/A код дат је изразом:![]()
Стандарднo одступање грешке у одређивању положаја пријемника ![]() за C/A код дат је изразом:
за C/A код дат је изразом:
![]()
Методологија и математички апарат за прорачун разних утицаја на тачност сигнала и мерења грешака је доста сложен и он заслужује посебне странице, за опис и објашњења.
Повећање тачности
Надоградња

телефона.
Аугментацијске методе побољшања тачности почивају на спољној информацији која се интегрише у калкулацијски процес. Постоје многи слични системи у простору те се уопштено називају или описују на основу начина на којиi GPS сензор прима информације. Неки системи трансмитир додатне информације о изворима грешака (попут помака сата, ефмериде или ионосферску одлагања), док други дају директна мерења о томе колико дуго је сигнал био искључен у прошлости, док трећа група даје додатне навигационе информације или информације о возилу како би се оне интегрисале у калкулацијски процес. Примери надограђених система укључују надограђени систем широког поља, диференцијалнии GPS, инерцијални навигациони систем и асистирани GPS.
Диференцијални GPS
За диференцијални GPS, користе се пријемници на фиксним страницама чије су координате познате. Стално се прорачунава позиција ових пријемника на основу GPS сигнала и пореди се са стварном, познатом. Услед разних фактора који уносе грешку, стварна и прорачуната позиција нису међусобно једнаке. Тако је позната грешка у прорачуну позиције на локацији фиксне станице, а претпоставља се да ће се на оближњим локацијама појављивати иста врста и вредност грешке. GPS пријемници, у близини ових фиксних станица, додатно примају ову информацију и користе је за корекцију грешке своје позиције.
Примена диференцијалног GPS-а је веома широка. Она претпоставља јединствен систем који се састоји од мреже фиксних станица, начин емитовања информација са фиксних станица и могућност GPS пријемника да ове информације приме и процесирају. Постоји бројни диференцијални GPS системи, различите примене и прецизности који гарантују. Неки од тих система су EGNOS, европски DGPS за навигацију на мору, национални US DGPS и канадски DGPS.
Обласни системи надоградње у ваздухопловству

Обласни системи надоградње у ваздухопловству су WAAS (енг Wide Area Augmentation System), односно систем надоградње широке области и LAAS (енг Local Area Augmentation System), односно локални системи надоградње. Оба система у свој рад укључују и методе диференцијалног GPS-а, а пошто се примењују у ваздухопловству задовољавају додатне критеријуме који се односе на безбедност.
ВААС је систем који је развијен за потребе и по спецификацијама FAA (eng. Federal Aviation Authority) САД. Он се састоји од мреже референтних (фиксних), контролних станица које обрађује податке, геостационарних сателита, земаљских станице за комуникацију са геостационарним сателитима и комуникационе мреже на земљи која повезује све станице.
Подаци са свих референтних се шаљу у контролне станице, које их анализирају и процењују утицај јоносфере на ажурирање GPS сигнала, грешке у процењеној позицији сателита и грешку часовника. Преко земаљских станица за комуникацију се подаци шаљу геостационарним сателитима, који затим емитују сигнал са подацима о грешци коју сваки ваздухоплов, у широкој области, може да прими и искористи за корекцију грешке при прорачуну позиције. ВААС покрива Северну Америку и типично постиже прецизност мању од 3 метра. Ова прецизност је потребна за навигацију ваздухоплова када лете инструментално (супротно од визулано, за шта су потребни идеални услови видљивости) Осим прецизности, овај систем испуњава строге захтеве за расположивост система, као и захтев за интегритет, тј да се константно врши надзор рада система и чим се детектује да нека компонента система не ради задовољавајуће, да се корисници одмах о томе обавесте. Пошто се сигнал о корекцији шаље преко сателита, ВААС је пример система надоградње базираног на сателитима (ВААС, енг Satellite Based Augmentation System).

LAAS је систем надоградње који покрива област око аеродрома и намена им је да ваздухопловима у прилазу обезбеде прецизни прорачун позиције. LAAS се састоји од фиксних станица које обезбеђују диференцијални GPS, контролне станице које све сигнале обрађују и процењују грешку, антене која емитује сигнал о грешци за сав околни саобраћај и специјалне опреме у ваздухоплову. У ваздухоплову постоје GPS пријемник који прима GPS сигнале, пријемник за пријем LAAS корекције грешке, компонента за процесирање сигнала и показивач који служи за ILS (јез Instrument Landing System). LAAS такође мора да задовољи строге критеријуме расположивости и интегритета. Пошто се сигнал о корекцији шаље преко антене на земљи, ВААС је пример система надоградње, базираног на сателитима (SBAS, енг Satellite Based Augmentation System). У овом тренутку има више LAAS уградњи од којих су многе у фази развоја и испитивања.
Примена
Као што је већ речено, GPS је првобитно развијен за војне потребе, а затим је прешао и у цивилну употребу. Данас се P-код користи за војну употребу од стране војске САД за одређивање позиције, навигацију на земљи, мору и ваздуху, навигацију пројектила и друго. Цивилна употреба је такође разноврсна: навигација на копну, мору и ваздуху, геодетска мерења и прецизно одређивање времена. Треба имати на уму да GPS контролише и развија влада САД и да политичка и војна збивања у будућности могу да доведе до нерасположивости GPS сигнала. Влада САД може да примењује функцију селективне доступности, тј намерно смањење прецизности GPS сигнала, у ком случају је битно да апликације код којих је прецизност критична то могу да детектују.
Код навигационих примена, GPS се користи у саставу навигационих система који поседују податке о окружењу, као нпр GPS систем у возилима који има мапе градова и путева и прати где се возило налази и којим се путевима креће, или GPS систем у ваздухопловима који прати да ли се ваздухоплов креће по прописаним путевима кроз ваздушни простор и стандардним рутама за прилаз и полетање авиона.
За примене у геодезији, GPS је револуционарна техника која је омогућила да се релативно лако и јефтино премере области за које до скоро нису постојали подаци или су постојали веома непрецизни подаци. С друге стране, у неким геодетским применама је GPS још увек недовољно прецизна техника. Нуспојава у коришћењу GPS-а је одређивање тачног времена. Сваки GPS пријемник може да синхронизује време са атомским часовницима на GPS сателитима. Ова погодност се користи за синхронизацију часовника на уређајима који могу бити стотинама и хиљадама километара удаљени, а морају да функционишу као целина. Нпр, за синхронизацију сервера великих рачунарских мрежа.
Војна примена

- Навигација: GPS омогућава војницима проналазак циљева у тами или на непознатој територији, олакшава координацију покрета трупа и снабдевање. GPS пријемници које користе команданти и војници називају се заповеднички дигитални помоћник (енг. Commanders Digital Assistant) односно војни дигитални помоћник ((енг. Soldier Digital Assistant).
- Праћење циља: различити војни оружани системи користе GPS за праћење потенцијалних циљева у ваздушном простору, на копну и мору, пре него што буду означени од непријатеља за уништење. Ови оружани системи преносе GPS координате циљева до прецизно навођене муниције како би им обезбедило тачно гађање. Војне летелице, посебно оне коришћене у наменама ваздух - земља, користе GPS за проналазак циља (пример, за видеокамеру оружја AH-1 Cobra у Ираку, презентиране су GPS координате).
- Навођење ракета и пројектила: GPS омогућава тачно гађање различитог војног оружја, укључујући ICBM, крстареће ракете и прецизно навођене муниције. Артиљеријски пројектили с уграђеним GPS пријемницима, који могу издржати убрзања и од 12.000 „g“ или око
117.600 m / развијени су за употребу хаубица од 155 mm.
развијени су за употребу хаубица од 155 mm. - Улога у тражењу и спашавању: нпр. оборених пилота, који се могу брже лоцирати, ако имају GPS пријемник.
- Извиђање и израда карата: војска користи GPS у великом обиму као помоћ у картирању и извиђању.
- GPS сателити такође носе склоп нуклеарних детонацијских детектора који се састоје од оптичког сензора (Y-сензор), сензора X-зрака, дозиметра, и електромагнетног пулсног (EMP) сензора (W-сензор) који је главни део система за детекцију нуклеарних детонација САД-а.
Цивилна примена

у којој се изводи научни експеримент
којем је потребан прецизан
Велики број цивилних примена имају користи од GPS сигнала, користећи једну или више од 3 основних његових карактеристика: апсолутну локацију, релативно кретање и пренос мереног времена.
Способност детерминисања апсолутне локације пријемника омогућава да исти служе као геодетски алат или помоћ у навигацији. Капацитет детерминисања релативног кретања омогућава пријемнику израчунавање локалне брзине и оријентације што је корисно за пловила или посматрање и прикупљање података о Земљи. Синхронизација часовника на егзактне стандарде, што омогућава пренос времена који је критичан за велику комуникацију и системе за посматрање и прикупљање података. Пример је CDMA дигитални мобилни телефон. Свака базна станица има GPS временски пријемник за синхронизацију сопствених ширећих кодова са осталим базним станицама ради олакшавања међустаничног руковања и подршке хибридног GPS / CDMA мобилних телефона са позиционирањем, у случају хитних позива и других примена. Коначно, GPS омогућава истраживачима проучавање Земљине околине укључујући и атмосферу, јоносферу и гравитационо поље. GPS геодетска опрема је револуционарно техничко достигнуће, за директно мерење померање тектонских плоча у потресима.
Америчка влада надзире извоз неких цивилних пријемника. Сви GPS пријемници који могу функционисати изнад висине од 18 km и при брзини од 515 m/s, класифицирају се као војна опрема, за коју је потребна извозна дозвола америчке администрације. Ови параметри су јасно изабрани ради превенције употребе пријемника у балистичким пројектилима. Ипак, они не спречавају употребу у крстарећим ракетама јер су њихове висине и брзине сличне онима код обичних комерцијалних и других цивилних авиона.
Ово се правило односи чак и на друге чисто цивилне уређаје који само примају учестаност L1 и код C/A кода, где не могу исправљати SA, итд.
Деактивирање операције изнад ових ограничења ослобађа пријемник од класификације као војне опреме. Различити продавци на различит начин су интерпретирали ова ограничења. Правило специфицира операцију изнад 18 km и 515 m/s, али неки пријемници престају радити на висини од 18 km, чак кад су и стационарни. То је изазвало проблеме у лансирању неких аматерских радио балона јер они редовно достижу висину од 30 km.
GPS водич и такође су примери цивилне употребе. GPS се овде користи за одређивање тренутка приказивања садржаја. На пример, приликом приближавања историјском споменику информисаће нас о њему, као и праћење кућних љубимаца итд.
Функционалност GPS, почела се сада кретати према масовним мобилним телефонима. Прве микротелефонске комбинације са интегрисаним GPS-ом, пуштене су у промет већ у касним деведесетим годинама прошлог века, а биле су широко доступне за потрошаче на мрежама Некстела, Спринта и Веризона 2002. године, као одговор на US FCC мандате за позиционирање микротелефонске комбинације у хитним позивима. Могућности за приступ програмера за развој софтвера, од треће стране, тим својствима у почетку је било споро све док Некстел није свој API отворио за све развојне фирме, а убрзо су га следили Спринт и Веризон.
Напомена
* То се може видети из чињенице да су три сферне површине секу обично на две тачке као што је приказано у трилатерацији и за четврту сферну површину да сече остале три, она ће морати да прође кроз једну од тачака на којој ће остале три да се укрштају. Ово је посебан случај, а није општа ситуација. Такође, због чињенице да су две раскрснице (два пресека) типични за три сферне површина, може се рећи да су три сателита недовољна.
Види још
- Радар
- Инерцијални навигациони систем
- Жироскоп
Извори
- DARPA: 50 Years of Bridging the Ga
- Navstar
- GPS Satellite Network
- Evolution of the Global Navigation SatelliteSystem (GNSS)
- Technology transfer
- The precision revolution
- AF Space Command Chronology
- 2ND SPACE OPERATIONS SQUADRON
- The Global Positioning System
- GPS Wing Reaches GPS III IBR Milestone
- GPS almanacs
- USNO NAVSTAR Global Positioning System
- U.S. Global Positioning System Policy
- Assisted-GPS Test Calls for 3G WCDMA Networks
- First Modernized GPS Satellite Built By Lockheed Martin Launched
- Air Force Completes Transition of GPS Fleet to Upgraded Control System
- GPS system 'close to breakdown
- Air Force Responds to GPS Outage Concerns
- Air Force GPS Problem: Glitch Shows How Much U.S. Military Relies On GPS
- Contract Award for Next Generation GPS Control Segment Announced
- United States Naval Observatory (USNO) GPS Constellation Status
- United States Naval Observatory. GPS Constellation Status
- United Launch Alliance GPS IIF-2
- United Launch Alliance GPS IIF-3
- United Launch Alliance GPS IIF-4
- Global Positioning Systems, Inertial Navigation, and Integration
- A Guide to the Global Positioning System (GPS)
- OMEGA
- Why GPS?
- How GPS works
- Fact Sheets - Global Positioning System
- NAVSTAR GPS User Equipment Introduction
- The Mathematics of GPS
- An Algebraic Solution of the GPS Equations
- Geometric Dilution of Precision (GDOP) and Visibility
- Ephemeris Server Example
- GNSS - Frequently Asked Questions - GPS: Will SA ever be turned back on?
- The Global Positioning System by Robert A. Nelson Via Satellite
- Real-World Relativity: The GPS Navigation System
- Nacionalni US DGPS
- Nonproliferation programs and arms control technology
- Missile Technology Control Regime (MTCR)