
Инерцијални навигациони систем (ИНС), намењен је за мерење параметара навигације објекта у простору, са коришћењем рачунара и сензора. Промене „вектора стања“ објекта у простору, детектују се са мерењем његовог транслаторног кретања (акцелерометрима) и ротације (жироскопима). ИНС континуално преузима пристигле сигнале из сензора, на основу њих рачуна параметре навигације и упоређује добијене резултате, у односу на почетно стање мировања објекта, или на неко ново узето референтно стање. На тај начин континуално одређује оријентацију и брзину објекта (правац и брзину кретања), у реалном времену. Параметре кретања, слободног тела у простору, одређује без потребе за сталним референтним поређењем, у односу на сопљно окружење. Систем функционише, као што се објекат креће, тако што мери кинематске параметре за шест степени слободе, три транслације (дуж три осе) и три ротације (око њих). Користи се за навигацију на покретним објектима, као што су бродови, авиони, подморнице, вођене ракете и свемирске летелице.
Концепт инерцијалног навигационог принципа заснива се на мерењу убрзања у транслаторном кретању дуж оса и угаоних брзина, ротације око оса. На основу познате масе и измерене силе инерције рачунар одређује убрзање и на основу силе прецесије угаону брзину. Велики недостатак ИНС су одступања у мерењу, са расположивим сензорима. У пракси се то превазилази са комбинацијом ИНС и других навигациох система. На пример, у комбинацији са системом GPS, добијају се апсолутни подаци положаја сваке секунде, док сам ИНС интерполира средње вредности. Са употребом Калмановог филтера, у одговарајућој петљи регулисања грешке мерења ИНС-а, своде се на минимум.
За инерцијални навигациони систем, везани су појмови: инерцијална референтна платформа, инерцијални инструмент, инерцијална мерна јединица и многе друге варијације назива.
Општи преглед
Инерцијални навигациони систем поседује рачунар, платформу и модул са сензорима: акцелерометрима, жироскопима или другим уређајима за детекцију кретања. ИНС одреди своју почетну позицију и брзину, из неког другог извора (измери је човек-оператор, GPS са сателитским пријемником, итд), а затим израчунава своју позицију и ажурира брзину интегрисањем информација добијених од сензора о кретању. Предност система је у томе што не захтева спољашње референтне објекте, како би се утврдила сопствена позиција, оријентација и брзина, са релативним поређењем. Садржи пакет сензора, који у комбинацији дају информације за израчунавање инерцилних сила у три линеарне димензије (дуж три осе) и три угла ротације око тих оса. Специфичност мерења је у односу на меру убрзања из слободног пада. У резултату мерења удузима се учешће гравитационог убрзања, тако да остаје само релативно покретног објекта.
Поред комбинације акцелерометара у линеарним правцима и жироскопа за сигнале угаоног кретања око оса, систем поседује и процесорску плочу, меморију и сензор температуре. Обезбеђен је дигитални интерфејс, за конверзију јединица и примену модула сензора калибрације.
Пошто ИНС само повремено користи споњно референтно поређење, исти није имун на грешке. Без обзира што је незаобилазан у употреби за навигацију са бродовима, авионима, свемирским летелицама и вођеним ракетама.

система, сензори региструју
Жироскопи мере угаону брзину система у односу на инерцијални референтни оквир. Ако се користити оријентација система у односу на инерцијални референтни оквир, као почетно стање и континуално интегрисање угаона брзина, тренутна оријентација система позната је у сваком тренутку.
Брзина се мери преко транслаторног убрзања система у односу инерцијални референтни оквир, али само у правцима оса координатног система, у којима само и могу бити мерени у односу на покретни систем (јер су акцелерометри фиксирани у систему и ротирају се заједно, али то не утиче на њихово мерење).
Поред наведених недостатака ИНС има и предности, пример су код претовара бродова у лукама и код подморница у неким случајевима. Бродови повремено пролазе у лукама поред препрека, као што су металне дизалице и тада је GPS сигнал нејасан. У тим ситуацијама ИНС је поузданији. Такође на подморницима коришћени је додатни GPS сонар. При потапању његове антене у воду губи се сигнал.
Историја
Инерцијални навигациони системи су првобитно били развијени за навигацију ракета. Амерички пионир ракетне технике Роберт Годард (енгл. Robert Goddard), експериментисао је са елементарним жироскопским системима. Његови системи, били су од великог интереса за немачког конструктора Вернера фон Брауна, пред Други светски рат. Систем је ушао у ширу употребу са појавом летелица, вођених ракета, као и комерцијалних авиона.
Почетком Другог светског рата, на ракети V-2 примењена је варијанта система са комбинацијом два жироскопа и акцелерометра за бочно убрзање са једноставним аналогним рачунаром за подешавање азимута летелице у лету. Аналогни сигнали из рачунара, коришћени су за померање четири спољна крмила на перајима репа, за управљање са летом. Касније је технологија инерцијалних сензора усавршена у еминентним институцијама, стварани су први инерцијални навигациони системи. Развијена технологија инерцијалних навигационих система, омогућила је реализацији велики програма свемирског летења, као што су програм Аполо.
До појаве MEMS технологије, инерцијални сензори састојали су се од прецизних механичких жироскопа и акцелерометара.[a] Због своје високе цене, инерцијална технологија за детекцију, била је резервисана за врхунске ваздухопловне апликације. Како је технологија инерцијалних сензора MEMS током година сазрела, са ниским фиксним ценама чипова, постала је доступна као алтернатива старијим механичким инерцијалним сензорима. Без обзира што нови MEMS сензори дају ниже укупне перформансе, у односу на своје механичке алтернативе, они имају предност у драстичном смањењу запремине, трошкова и у захтевима за интеграцију.
По завршетку рата Фон Браун, прешао је американцима. Пренео је око 500 својих најбољих пројеката ракета. Научници су, заједно са пројектима и прототиповима, прешли у Америку. Стигли су у Тексас 1945. године, у оквиру операције „спајалица“, а затим су се преселили у истраживачки центар у Алабами, 1950. године, где су радили на развоју и истраживању америчких војних програма ракетне технике.
У раним педесетим годинама, прошлог века америчка влада желела је да се ослободи зависности од немачких научника, у домену војне технологије. Међу областима које су американци самостално развијали била је вођена ракета. Тада је донета одлука за самосталан развој резервног навигационог система „атлас“, за нову интерконтиненталну балистичку ракету. Навигациони систем „атлас“, требало је да буде комбинација аутономног навигационог и командног система. То је био почетак филозофске полемике, која у неким областима, остаје нерешена. Коначно је превагнула концепција балистичке ракете са сопственим навигационим системом, из разумљивих технолошких разлога.
У лето 1952. године, започето је интезивно истраживање принципа навигације, засновано на рачунарским принципима и резултатима. Започет је развој алгебарског програмског језика (MAC), за рачунар IBM 650, који је завршен и постао оперативан у рано пролеће 1958. године. (MAC) је постао радни „коњ“ лабораторије. (MAC) је веома читљив језик, са три линије формата, векторском матрицом и са индексираним ознакама. Данашњи језик Спејс шатла, директан је огранак/потомак од (MAC).
Почетни навигациони систем „делта“, процењује разлику положаја објекта од референтне трајекторије. Брзине које се добијају прорачуном, коригују се са циљем да се разлика тренутног положаја и референтне трајекторије постепено помера према нули. Овај математички приступ у суштини је поуздан, али није прошао комплетан принцип због недовољне прецизности инерцијалног вођења и због недостатака тадашње аналогне рачунарске технологије. Проблеми, са којима се суочавао „делта“ систем, превазиђени су са увођењем „Q система“, првенствено примењеним за балистичке ракете. Новина је да „Q систем“ принуди усмеравање ракете, сагласно једначинама кретања, изражених преко матрице Q. Матрице Q представљају парцијалне изводе вектора стања по брзини. Кључна функција оваквог приступа омогућила је примену извода компоненти вектора стања као податак за оформљење улаза у аутопилот, за управљање. „Q систем“ је представљен на првом техничком симпозијуму о балистичким ракетама, одржаном у Лос Анђелесу 21. јуна 1956. године. Деривације овог принципа, користе се и за данашње ракете.
Човекова оријентација у свемиру
У фебруару 1961. године, НАСА је са подуговорачима склопила уговоре за идејни пројекат и проучавања концепције за навигациони систем Аполоа. Генерал моторс групација, добила је укупни уговор за пројектовање и производњу система за вођење и навигациони систем за Аполо, за командни и лунарни модул.
За Спејс шатл, отворена је петља (без повратне информације) систем се користи да води шатл од лансирања до раздвајања од чврсте везе са ракетним носачем. Након одвајања, примарни систем вођења шатла добио је ознаку PEG4. Он се заснива на „Q систему“ и поседује коректорне атрибуте оригиналног „делта система“. Навигациони систем шатла је претрпио велики број измена и модификација, за последњих 30 година. Међутим, ипак данашњи навигациони систем за вођење шатла има сасвим мале разлике од почетног решења. У оквиру система навигације објеката са људском посадом, постоји интерфејс са посадом, потребан за навигациони систем. У томе контексту, ригорозна је селекција астронаута за коришћење система, много нових тимова се формирају да се обучавају за употребу система навигације, а на крају изаберу се малобројни, само најспособнији.
Основни принцип
Полазна тачка је детекција убрзања и ротације, помоћу инерцијалних сензора. Убрзање тела у простору, одређеног интезитета и правца, познато је преко сигнала из сензора. Узимају се у одређеним тренуцима, по „корацима“, па се у томе процесу и интегришу током времена. Резултати интеграције је брзина, промена положаја s(t) и угаона позиција тела. Промена пређењног пута (дужна позиција) s(t), добија се после друге интеграције сигнала из акцелерометра (прва даје брзину). Принцип је заснован на Њутновом закону механике, и то:

Прорачуни укупног убрзања летелице (укључујући и гравитацију земљине теже) могу бити изведени на директан начин.
![]()
Са познатим почетним условима, почетна брзина и полазни положај летелице (или било кога другог објекта), следи интеграција током времена, између два тренутка предаје података сензора.
Исто важи и за угаоне брзине, које се могу конвертовати путем утврђивања угаоне прецесије сензора (жироскопа), са једноставном интеграцијом током времена у угао нагиба у инерцијалним простору. ИНС даје укупно симултано мерење шест променљивих, у три међусобно ортогонална правца у простору. Они се односе, на три транслаторна степена слободе са три убрзања и три ротације са три угаоне брзине.
У последњој једначини је![]() положај летелице,
положај летелице, ![]() вектор брзине у односу на инерцијални референтни оквир. Вектор убрзања летелице, дефинисан је као последа разлике између потиска и отпора летелице. Вектор укупног убрзања представља збир
вектор брзине у односу на инерцијални референтни оквир. Вектор убрзања летелице, дефинисан је као последа разлике између потиска и отпора летелице. Вектор укупног убрзања представља збир![]() и
и![]() . Једноставан алгоритам прорачуна положаја и брзине летелице, заснива се на једначинама разлика првог реда, које имају облик:
. Једноставан алгоритам прорачуна положаја и брзине летелице, заснива се на једначинама разлика првог реда, које имају облик:
![]()
![]()
Вектор![]() , добијен је интегралењем, без узимања у обзир утицаја компоненте силе од гравитационог убрзања. Вектор гравитације
, добијен је интегралењем, без узимања у обзир утицаја компоненте силе од гравитационог убрзања. Вектор гравитације![]() је функција положаја у времену
је функција положаја у времену![]() . Пошто се брзина ажурира помоћу просечне вредности гравитације у једном интервалу за временски корак, овај метод се назива „просечни
. Пошто се брзина ажурира помоћу просечне вредности гравитације у једном интервалу за временски корак, овај метод се назива „просечни![]() метод“. Пажљивом анализом грешака кретања летелице у орбити Земље, показало се да овај алгоритам даје грешку, за пређени пут од 100 m и у брзину од 0,2 m/s, за период лета од 35 минута, користећи временски корак интеграције од 2 секунде. Поредећи то са типичном грешком акцелерометра, грешка од рачунарског алгоритма је за неколико редова величине мања.
метод“. Пажљивом анализом грешака кретања летелице у орбити Земље, показало се да овај алгоритам даје грешку, за пређени пут од 100 m и у брзину од 0,2 m/s, за период лета од 35 минута, користећи временски корак интеграције од 2 секунде. Поредећи то са типичном грешком акцелерометра, грешка од рачунарског алгоритма је за неколико редова величине мања.

Употреба у ваздухопловству
Један од примера популарних ИНС, за комерцијалне авионе, је „Делко карусел“ (енгл. Delco Carousel), који је обезбеђивао делимичну аутоматизацију пловидбе у периоду пре него што је са комплетним летом управљао навигациони систем, као стални стандард. „Делко карусел“ је омогућавао пилоту вођење авиона између низа познатих тачака, а затим и за вођење авиона са једне путање на следећу, користећи и инструменте за допунско одређивање положаја и брзине авиона. Боинг корпорација, наручила је производњу ИНС Делко карусел. Џенерал моторс је одређен за пројектовање и произвоњу првог система Делко карусел, за прве типове авиона (B-100, B-200, B-300) и за познати B-747. Боинг 747 користи троструки систем Делко карусел, који раде паралелно, са повећаном поузданошћу. ИНС Делко карусел и његови деривати, касније су усвојени за коришћење у многим другим комерцијалним и војних авионима. Америчког ратног ваздухопловства, опремило је први војни авион C-141 старлифтер, који је користио двоструки ИНС Делко карусел, затим C-5 галаксија који користи троструки систем, слично као и Боинг 747. Боинг KC-135 флота, опремљена је са двоструким Делко карусел системом, који ради уз помоћ доплер радара.
Подсистеми инерцијалног навигационог система

систем, за балистичку ракету S3
ИНС поседује инерцијалну мерну јединицу, која мери угаоно и линеарно убрзање (за прорачун промене позиције), неке јединице укључују и жироскопски елемент (за одржавање апсолутне угаоне референце).
Ротацију летелице у простору мери угаони брзиномер. Генерално, постоји барем један сензор за сваку од три осе: пропињање (врх трупа иде горе и доле), скретање (нос иде лево и десно) и ротација (у смеру казаљке на сату или супротном смеру казаљке на сату, гледано из кабине).
Линеарни брзиномер мери убрзање летелице, без доприноса гравитације. Будући да се може померати дуж оса (горе и доле, лево и десно, напред и назад), постоји линеарни акцелерометар за сваку осу.
Рачунар континуално рачуна тренутни положај летелице. Прво, за сваки од шест степени слободе (x, y, z и углове θx, θy, θz), он интегрише током времена регистровано убрзање, заједно са проценом гравитације, за рачунање тренутне брзине. Тада интегрише брзину, да израчуна тренутну позицију, ткође са интеграциом угаоних брзина одређује углове положаја тела.
Инерцијална навигација се тешко може остварити без рачунара. Жеља за коришћење инерцијалног навођења у пројектилима, као пројекат Аполо довео је до покушаја смањења рачунара.
Инерциони навигациони системи, данас се обично комбинују са сателитским навигационим системом, преко система дигиталног филтрирања, са увођењем Калмановог филтра. Инерцијални систем обезбеђује краткорочне податке, док сателитски систем исправља акумулиране грешке инерцијалних система.
Инерциони навигациони систем који ради близу површине Земље мора имати уграђено подешавање, то јест модификације електронског система управљања, па платформа наставља да се реперише на центар Земље при кретању летелице од једног до другог места.
Карданска жироскопска стабилисана платформа
Код неких система постављају се и линеарни акцелерометри на стабилисану платформу, са карданским жироскопима. Кардански механизми су склоп од три прстена (види десно), сваки са паром лежаја, под правим углом. Они омогућују платформи да се обрће око све три осе ротације (или, боље речено, дозвољава платформи да задржи исту оријентацију док се возило окреће око њега). На платформи се обично удвајају жироскопи, у функцији неутралисања њихове прецесије. Прецесија је тенденција жироскопа да се заокрене под правим углом према улазној сили поремећаја. При уградњи пара жироскопскопа за једну осу (исте ротационе инерције и при истој брзини обртања) под правим углом се неутралише прецесија, а платформа се опире обртању.
Овај систем допушта, да се директно мери прецесија на лежајевима кардана, аналогна угловима ваљања, пропињања и скретања летелице. Релативно једноставна електрична кола могу се користити за сабирање линеарних убрзања, јер правци линеарног убрзања се не мењају.
Велики недостатак овог концепта, што се користе много скупи прецизни механички делови. Ови системи поседују велики број покретних делова, који се хабају или заглављују, те су присутни откази кардана. Примарно вођење система Аполо летилице, заснива се на примени жироскопске стабилисане платформе са три осе, који снабдева рачунар Аполо са подацима за навигацију. Маневар је морао бити пажљиво планиран (ограничен) да се избегне отказ кардана.
Стабилисана платформа, са хидроуличким лежиштима
Проблем заглављивања механичких лежишта карданског склопа жироскопа успешно је превазиђен са увођењем течних лежишта. Са тиме су и ограничења маневра летелице превазиђена. Застој кардана ограничавао је маневрисање летелице, било је корисно да се елиминишу клизни прстенови и замене са слојем течности у лежајевима кардана. Код њих се осовине кардана наслањају на слој течности уместо на механички посредни прстен. Ови системи могу имати веома високу прецизност. Као и све жироскопске стабилисане платформе, овај систем ради добро са релативно спорим рачунаром, мале снаге.
Течни лежајеви су у ствари течни јастучићи са отворима, кроз које под притиском инертног гаса (као што је хелијум), слој уља са повећаним притиском спречава директно механичко налегање осовинице кардана, већ иста плива на слоју течности. Течни лежајеви су клизави, са смањеним отпором трења и сферична карданска платформа слободно ради без механичких отказа. Обично се постављају четири таква лежаја, у систему кардана за подршку поузданог рада платформе.
Редни системи
Лагани дигитални рачунари дозвољавају систему да елиминише карданов прстен, стварајући редни систем, тако се може звати јер су његови сензори једностано засебно нанизани на летелици. Ово смањује трошкове, елиминише застој кардана, смањује се потреба калибрације, и повећава поузданост уклањањем неких покретних делова. Угаони опсег сензора зове се опсег жироскопског мерења промене угаоне брзине летелице.
Редни систем има динамички опсег мерења неколико стотина пута већи од карданског система. То јест, он мора интегрисати промене возила у односу на пропињање, ваљање и скретање, као и укупно кретање. Кардански системи могли би се обично добро ажурирарати са опсегом 50-60 Hz. Међутим, редни системи обично се ажурирају на око 2.000 Hz. Што је већи опсег од потребног за максимална угаона мерења било кога захтева за реални жироскоп. Највеће опсег жироскопа, обезбеђују ласерски интерферометри.
Ажурирања укључених података у алгоритам навигације, превише су сложена да би се могло извести прецизно то извођење, сем са дигиталном електроником. Међутим, на срећу су дигитални рачунари сада толико јефтини и брзи, да се жироскопски системи, сада практично користе и произведе, масовно. Лунарни модул Апола користи редни систем, као резервну опцију.
Данас се најчешће користе редни системи у комерцијалној и тактичкој примени (авиони, ракете, итд.) Међутим, они још увек нису распрострањени у апликацијама где се тражи потребна врхунска тачност (као што су подморнице за навигацију или стратешко вођење ракета).
Облик базног поравнања
Оријентација система жироскопа може се понекад једноставно установити на основу његове историје позиције (нпр. у односу на GPS). Ово је посебно случај са авионима и аутомобилима, при чему вектор брзине обично подразумева оријентацију трупа, односно каросерије.
На пример, поремећај у покрету је процес, када се авион креће, у ваздуху или на Земљи. Ово се установљава коришћењем GPS-а и инерцијалном логичком провером, чиме се омогућава комерцијални интегритет услова података које морају испунити. Овај процес је FAA сертификат (међународни ваздухопловни пропис), да се поврати на чист еквивалент стационарних перформанси ИНС и усклади процедура за цивилни лет, у временском периоду трајања, до 18 сати.
Ласерски жироскоп

Прстен ласерског жироскопа дели сноп ласерске светлости у два дела, у супротним смеровима, кроз уске тунеле у затвореном оптичком кружном путовању по ободу блока троугластих температурно стабилних слојева стакла са одразом огледала постављеним у сваком углу троугла (види слику десно). Када жироскоп ротира, у неком угаоном делу, растојање које сваки зрак пређе за различити краћи пут, биће супротан од ротације. Тада се ласерски снопови фазно диференцирају. Фаза при померању између два снопа, може се мерити интерферометром, а разлика је пропорционална брзини ротације.
Прстен ласерског жироскопа пружа одличне перформансе по нижој цени и са већом поузданошћу, него што је то остварљиво са механичким жироскопом, који је по својој природи сложенији и склон кваровима. Иако прстен ласерског жироскопа пружа веома елегантно решење за мерење угаоних вредности, чини један значајан проблем, пошто на ниским вредностима фреквенције се појављује „закључавање“ између два супротна снопа. У пракси, при ниским вредностима ротације, излазна фреквенција може пасти на нулу након тога заостало расипање изазива зону покривања, у којој се међусобно зраци синхронизују и спајају се. Ово је познато као „закључавање“, или „блокада ласера“. Резултат је да тада нема промене у обрасцу мешања, а самим тим ни могућности мерења.
Да би се то избегло, или откључало контра ротирајуће светло снопа, жироскопи или имају независне путање светлости за два правца (тада је избегнута та појава), или је ласерски жироскоп постављен на пиезо-електрични вибрациони покретач, који га брзо вибрира. Тада се ласерски прстен брзо помера напред и назад и са његовим улазом, кроз преводницу у региону, раздвеје се светлосни таласи.
Овај ринцип „мућкалице“ је најпрецизнији, пошто оба светлосна снопа користе потпуно исти пут.
Акцелометар са клатном

на горе изазива масу да се креће на
Основа, „отвореног кола“ акцелерометра, састоји се од масе везане за опругу. Маси је ограничено кретање, у складу са карактеристикама опруге. Убрзање, услед силе инерције, изазива тежњу да маса заостане. То заостајање је јој омогућава еластична опруга. Интезитет убрзања, изводи се из вредности угиба опруге, то јест дужини заостајања масе, што зависи од величини масе и крутости опруге (сматра се константа). Систем мора бити пригушен да би се избегле осцилације. Стабилизуја система, постиже са уградњом пригушивача. Акцелерометар са затвореном петљом постиже боље перформансе. Поседује повратну спрегу, помоћу које се поништава угиб опруге, па се маса скоро држи у стационарном стању при дејству убрзања. Кад год се маса помери, повратна спрега генерише супротну силу на масу, поништавајући њено померање. Генерише се електромагнетна сила са електричним калемом (магнетом) истог интезитета, а супротног смера, у односу на изасзвану силу инерције са убрзањем. Овде се вредност убрзања одређује од износа негативне електромагнетне силе, односно потребне јачине струје за напајање електромагнета. Пошто се маса скоро не помера, нелинеарност крутости опруге, њен хистерезис и карактеристике система пригушења су знатно смањеног утицаја на мерење убрзања. Поред тога, овај акцелерометар омогућава повећану пропусну моћ, избегнут је проблем резонанце, са аспекта поклапања принудних и сопствених учестаности, те није условљено кроз пројекат њихово међусобно удаљавање. Вредности убрзања, без обзира на врсту кола регулисања, одређују се лако са прорачуном, а коначно са мерењем и подешавањем.
Обе врсте акцелометра, производе се као интегрисани микро-машински елементи, у силицијумском чипу.
Методологија у ваздухопловству
У ваздухопловству се усваја географски координатни систем, за представљање вектора стања у навигацији. Принцип избора координатног система, обично се заснива на чињеници да је авион центар гравитације. Састоји се из три податка: један представља позицију дуж северне осе, други дуж источне осе, а трећи параметар представља вертикални положај летелице (висину). У међународној терминилогији, овај систем је познат као енгл. North east down, скраћено NED (види слику десно). Овај оквир се назива локални ниво референтног оквира. NED се креће око површине Земље, заједно са референтном платформом. У оквиру навигације, дефинише се координиратни оквир, који је референтно фиксиран са позицијом центра земље, као за z осу кроз северни пол, x осу кроз Гриничов меридијан, и y оса да заврши координатни систем, по правилу „десноруког оквира“.

Референтни центар се поклапа са центром Земље. Тада Земља представља фиксни оквир (енгл. earth-centered, earth-fixed), те се користи скраћеница ECEF. Трансформацијом ECEF, оквир NED дефинише географску ширину и дужину.
Систем једначина, који дефинише навигацију, садржи резултате меререња линеарних и угаоних вредности инерције из сензора летелице, у односу на инерцијални оквир. Односно, израчунава коначно стање и позицију у референтном оквиру NED, у односу на центар Земље. Где је:![]() специфична сила,
специфична сила,![]() је угаона брзина,
је угаона брзина,![]() је убрзање, R је позиција,
је убрзање, R је позиција,![]() и
и![]() су брзине,
су брзине,![]() је угаона брзина земље,
је угаона брзина земље,![]() је убрзање услед гравитације,
је убрзање услед гравитације,![]() и H су NED параметри локације. Индекси E, I и B представљају променљиве у односу на центар Земље, инерцијално или референтно тело, у низу, а
и H су NED параметри локације. Индекси E, I и B представљају променљиве у односу на центар Земље, инерцијално или референтно тело, у низу, а![]() је трансформација у референтном оквиру.
је трансформација у референтном оквиру.
Жироскопи и акцелерометри брзо мере угаону брзину и линеарно убрзање тела, у односу на инерцијални оквир. Интегрисањем угаоне брзине, за летелицу, добијене са трансформацијом![]() . Инверзија ове трансформације се користи за специфичну силу ротирања координата. Поново додавање гравитације даје убрзање тела у односу на простор. Интегрални део овог појма је време, то јест брзина промене положаја у односу на вектор простора. (Ово није за навигацију брзина. Дефинисана брзина за навигацију, у односу на координатни оквир, када је исти фиксиран за земљу. То је „земаљска навигација“). Корекција овог појма за ротационе ефекте за добијање ECEF брзине, дата је принципијелно приказано на слици. Други интеграл убрзања даје позицију вектора у координатама. Ротирајући овај вектор инерцијалног положајја за ECEF трансформације
. Инверзија ове трансформације се користи за специфичну силу ротирања координата. Поново додавање гравитације даје убрзање тела у односу на простор. Интегрални део овог појма је време, то јест брзина промене положаја у односу на вектор простора. (Ово није за навигацију брзина. Дефинисана брзина за навигацију, у односу на координатни оквир, када је исти фиксиран за земљу. То је „земаљска навигација“). Корекција овог појма за ротационе ефекте за добијање ECEF брзине, дата је принципијелно приказано на слици. Други интеграл убрзања даје позицију вектора у координатама. Ротирајући овај вектор инерцијалног положајја за ECEF трансформације![]() , које се добију интеграцијом вредности за земљу. Остатак навигационе солуције иде да се, ECEF позиција вектора претвара у географску ширину, дужину и висину. Они се користе за матрицу трансформације, између ECEF и оквира инерције за NED,
, које се добију интеграцијом вредности за земљу. Остатак навигационе солуције иде да се, ECEF позиција вектора претвара у географску ширину, дужину и висину. Они се користе за матрицу трансформације, између ECEF и оквира инерције за NED,![]() . Тада се трансформације
. Тада се трансформације![]() ,
,![]() и
и![]() комбинују, за формирање NED параметара за тело, преко трансформације
комбинују, за формирање NED параметара за тело, преко трансформације![]() .
.

Ротирајући сферни земљин навигатор
Напомена
MEMS је енглеска скраћеница од почетних слова израза, енгл. Micro-Electro-Mechanical Systems, микро-електро-механичких система. Представља технологију која у свом најопштијем облику јесте минијатуризована машинска (прецизна механика), са електро-машинским елеменатима, који су направљени коришћењем процеса микропроизводње.
Грешке мерења
Сви инерцијални навигациони системи склони су уношењу одступања, од тачних резултата. Мале грешке у мерењу убрзања и угаоне брзине, интегришу се у прогресивно увећавање грешке параметара навигације. Примењени принцип одређивања новог положаја, у односу на претходни, рачунато у корацима мерења и са прорачунима на основу тренутно пристиглог сигнала о транслаторном убрзању и угаоној брзини, у односу на све три осе координатног система, стално додаје системску грешку у коначан резултат. Грешке се увећавају кумулативно, у односу на почетно стање, по истој стопи, као као што се обнавља процес мерења и прорачуна. Због ове карактеристике неопходно је приказани положај повремено кориговати, са референтним податком са неког другог система навигације. Одступање од тачног положаја објекта, са навигацијом са ИНС-ом, у резултујућем износу, је просечно мање у пређеном путу од 1,1 km, а у промени правца, десетак степени, за сат рада система.
Сходно томе, инерцијални навигациони систем, обично се користи у комбинацији са другим неким системом, обезбеђујући виши степен тачности него што је то могуће уз коришћење било ког самостално. На пример, ако је, у теренској употреби, инерцијално праћена брзина, повремено ажурирана на нулу, са заустављањем објекта кретања (на тлу), позиција ће остати прецизна за дуже време. Често се користи та такозвана нулта брзина ажурирања.
Теорија опште контроле, посебно Калманово филтрирање, обезбеђује теоријски оквир за комбиновање информација од стране сензора разних врста. Један од најчешћих алтернативних сензора је сателитски навигациони радио као што је GPS. Правилним комбиновањем информације из ИНС-а и GPS, добијен је систем GPS / ИНС, са којим се стабилизује појава грешака у положају локације и у брзини објекта кретања. Осим тога, ИНС се може користити као краткорочно средство, док су недоступни GPS сигнали, на пример када возило пролази кроз тунел.
Калманов филтер (KF), веома је дјелотворни стохастички процењивач (судија) у навигацији. Он је оптимална комбинација, у смислу минимизације варијација одступања, између вредности претходних параметара и тренутних стварних. Он је изузетно ефикасан и свестран у процедури уједињења „бучних“ сигнала сензора, за процену стања система са неизвесном динамиком. У „бучне“ излазе (сигнале) сензора укључују се и излази из GPS и ИНС. У стање система може да се укључи положај, брзина и динамика ваздухоплова. Неизвесна динамика укључује и непредвидиве поремећаје параметара сензорских сигнала или поремећаје изазване од пилота или спољних поремећаја (као што је удар ветра).
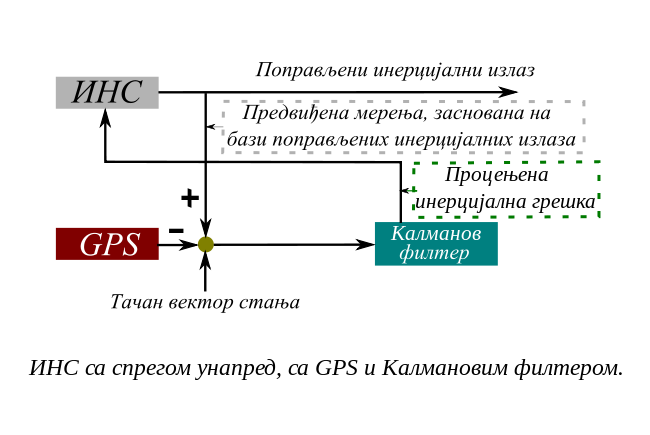
Калманов филтер, користи се за процену грешке уведене у систем због грешака жироскопа и акцелерометра. Ове грешке су у форми вектора стања![]() , а измерене вредности вектора стања са GPS облика
, а измерене вредности вектора стања са GPS облика![]() . Грешке, уз помоћ GPS система у петљи регулације „спрега-унапред“, са укљученим Калмановим филтером у њој, теже нултим вредностима (види слику испод)
. Грешке, уз помоћ GPS система у петљи регулације „спрега-унапред“, са укљученим Калмановим филтером у њој, теже нултим вредностима (види слику испод)
Види још
- Радар
- Глобални позициони систем – GPS
Референце
- ^ Инерцијална навигација
- ^ Инерцијални навигациони систем
- ^ MEMS технологија
- ^ MEMS инерцијални навигациони систем
- ^ Вернер фон Браун (1912-1977)
- ^ Увод у математику и методе астродинамике
- ^ Публикација НАСА
- ^ Морнаричка историја
- ^ Ракете са нуклеарном главом
- ^ Навигација за Аполо
- ^Основе инерцијалне навигације
- ^ Принцип рада акцелометра.
- ^ ИНС „Делко карусел“
- ^ „Делко карусел“ на Боингу 727
- ^ „Делко карусел“ IV-A
- ^ Eshbach's Handbook of Engineering Fundamentals By Ovid W. Eshbach, Byron pg 9
- ^ Жироскоп
- ^ Преглед
- ^ Жиро стабилизован инерцијални референтни систем
- ^ Кардански системи
- ^ Металлорежущие станки: Учебник / В. Э. Пуш, Москва:Машиностроение, 1986., страна 564
- ^ Редни системи
- ^ Предности и недостаци карданских и редних система
- ^ GPS у функцији цивилне навигације
- ^ Ласерски жироскоп
- ^ Дигитални ласерски жироскоп
- ^ Мултиосцилатор ласерског жироскопа
- ^Акцелометар са клатном
- ^ Вибрациони акцелометар
- ^ Интеграција инерцијалног навигационог система и GPS