
Квадратор је специфична аеродинамичка и конструктивна конфигурација, која се потпуно разликује од пилотираних ваздухоплова. Примењује се традицијонално за мале и лаке БПЛ-е, али у последење време све више и за БПЛ-е већих габарита. Има велику лепезу могућности примене, у свима областима људске делатности. Поседује флексибилније и разноврсније могућности од класичних конфигурација ваздухоплова. Без обзира што овој конфигурацији није могуће обезбедити природну стабилност. То се успешно остварује вештачки, помоћу јефтиних система, широке потрошње.
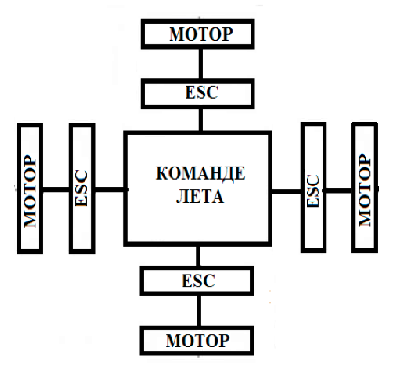
Код конфигурације квадратора, обезбеђене су могућности кретања напред, назад, десно, лево, горе, доле и временски дуго лебдење, према сигналу који корисник пошаље, у оквиру своје жеље. Те захтевне радње извршавају се одговарајућом концепцијом команди лета и стабилизације, преко програмираних међусобних комбинација режима рада четири мотора са роторима, по посебним софистицираним алгоритмима. Оквир (специфичан труп) довољно је чврст, тако да остаје не оштећен у случају судара или неприкладног (грубог) приземљења.
Посебности квадратора
Квадратор није типична аеродинамичка конфигурација. Природно је нестабилан што се вештачки надокнађује употребом система и уређаја за координацију четири мотора, који га погоне, симетрично распоређених по ободу оквира тела (трупа) летелице, као што је приказано на шеми. Ове мање БПЛ-це су погоњене електричним мотрима, напајани електричном енергијом акумулираном у квалитетним батеријама. За велике се користе мањи ваздухопловни мотори.
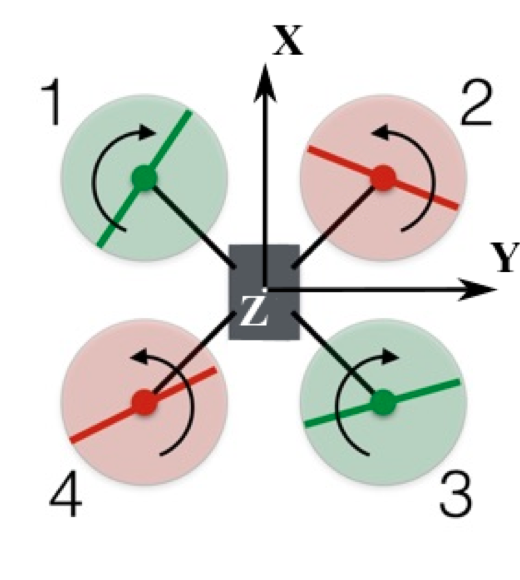
На приложеним илустрацијама, ротори су приказани као кружне површине, а смер њиховог обртања лучним стрелицама. Мотори обележени са бројем један и три обрћу роторе у смеру казаљке на сату (поглед одозго). Мотори два и четири, са роторима, обрћу се у супротном смеру од казаљке на сату. Сваки мотор, у склопу са ротором, производи потисну (узгонску) силу, а њиховом алгоритаском прерасподелом брзине ротације (интезитета потисне силе) око својих оса летелица се стабилизује и управља. Због симетрично супротног смера обртања мотора у склопу са роторома (2+2), њихов укупни реактивни момент (реакција на акцију) око Z осе се поништава на нулту вредност, при истом режиму обртања парова. Ово елиминише посебну потребу поништавања утицаје момента реакције изазваног активним утицајем ротора при савлађивању аеродинамичког отпора, што није случај код хеликоптера, код кога се тај момент реакције поништава репним ротором.
Квадратор, због својих предности у широкој примени, постепено потискује остале концепцијске шеме пројеката БПЛ-а. Он може ефикасно и временски дуго летети путем бежичне мреже комуникација, може дуго да лебди у месту, без промене позиције, да надгледа околину и прикупља информације о природним непогодама, временским и другим условима.
Програм за планирање пројеката БПЛ-а чине приоритетни задаци: комуникација са сензорима, команде лета и управљање прикупљеним подацима. Бежични примопредајници користе послате сигнале микрокомандама на управљачке јединице квадратора. Акцелерометар, жироскоп и магнетометар испоручују сигнале нивоа убрзања, стабилизације и вектора правца. Да би се постигао лет квадратора у жењеним фазама угаоног нагињања, пењања, лебдења или спуштања, мотори мењају режиме рада за постизање одређених сила по одговарајућем алгоритму. Сензори за надгледање временских услова прикупљају информације по одређеном обрасцу, а ти подаци се даље обрађују.
Корисна намена квадратора је надгледање територије и надгледање временских прилика, у условима где је људско учешће отежано. За разлику од класичних летелица, квадратор може да постигне и одржи вертикални лет и лебдење у стабилном стању. Није оптерећен потребом за конструктивним решавањем компезације момента скретања изазваног обртањем погонских ротора, као код хеликоптера, где се мора за то додати мањи репни ротор. Штавише, једноставнија је укупна реализација пројекта и јефтиније је одржавање летелице у експлоатацији. Како технологија постаје све напреднија и приступачнија, многи инжењери и истраживачи су започели пројекте и примену квадратора за амбициозније различите намене, у њиховој реализацији и већих димензија.


БПЛ-е са четири и осам погонских мотора са роториме (сл. 3)
На принципу квадратора реализују се пројекти и са осам мотора са роторима. Код таквих БПЛ-ца је двоструко упаривање режима рада мотора са роторима, у односу на принцип и решења на квадратору.
Струковне групације, као што су војска, инжењерство, истраживачи и хобисти шире лепезу намене квадратора, у многим областима. У томе смеру покренут је значајан број пројеката. Томе погодују велике могућности за прилођавање квадратора за испуњавање различитих и често опречних тактичко-техничких захтева. У томе погледу они предњаче у односу на већину других концепцијских шема БПЛ-а.
Управљање квадратором
Квадратор није типична аеродинамичка конфигурација, летећа је платформа без узгонских и стабилизационих површина. Није природно стабилан, што се вештачки надокнађује употребом система и уређаја за координацију четири мотора, који га погоне, симетрично распоређених по ободу оквира тела (трупа) летелице (сл. 1 и 5).
Без обзира на ту чињеницу, има веома садржајне и квалитетне облике лета, захваљујући системима за управљање и стабилизацију. У тим системима значајно место заузимају напредни сензори, чије присуство је приказано на слици 4.
Вертикална сила узгона настаје усаглашеним повећањем брзине обртања свих мотора са роторима, при индентичном режиму рада. Како укупна узгонска сила надјачава земљине гравитационе силе, тако се квадратор одваја од тла и пење на жељену (командовану) висину.
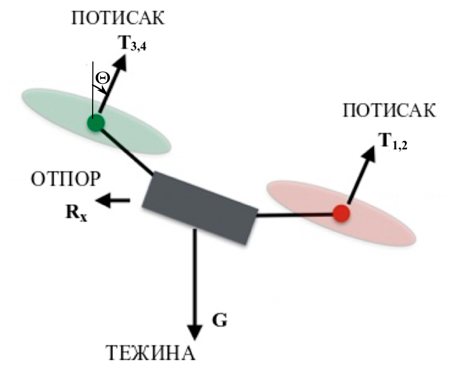
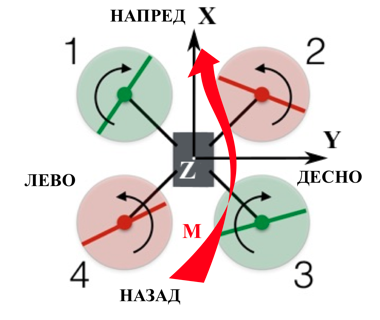
Како довести квадратор у нагнути положај (сл. 7)? То се постиже повећањем брзине ротације ротора 3 и 4 (задњих) и смањењем брзине ротације 1 и 2 (предњих). Укупна сила узгона, збир прерасподељених појединачних сила, изједначава се са тежином летелице, тако да квдратор продужава лет без промене надморске висине.Један од задњих ротора се окреће у смеру казаљке на сату, а други супротно. Појединачно повећани обртни моменти су супротног смера око Z осе, истоветним повећањем ротације оба ротора, и даље ће остати међусобно истоветни и поништавају се. То исто важи и за предње роторе. БПЛ-а. При томе уздужном нагињању, БПЛ-ца лети праволинијски без промене правца (не мења се угао скретања ψ), а са непромењеним укупним узгоном и без промене висине. Праволинијски лет се одвија на основу добијене компоненте вучне силе услед нагиба ротора унапред, услед веће силе потиска задњих ротора БПЛ-е, од укупних на предњим роторима. На овај начин сила потиска се разлаже на компоненту узгона и компоненту вучне силе, за кретање БПЛ-е унапред. Сви ротори аутоматски појединачно подешавају потисак тако да и даље остаје укупни узгон једнак тежини БПЛ-е, за командовани услов хоризонталног лета, уз одржање почетног услова изједначених потисака упарених ротора. Услов за нагиб под углом Θ да је: (T3 + T4) = (T1 + T2). Испуњен је услов у хоризионталног лета: G = Rz = (T1 + T2 + T3 + T4) cosΘ. За лет унапред испуњен је услов равнотеже: Rx = (T1 + T2 + T3 + T4) sinΘ. Уздужни нагиб квадратора (за угао Θ око Y осе), приказан је као пример. Како се предњи мотори Т1,2 успоравају, сила коју генеришу његови ротори је мања од силе коју заједно генеришу задњи Т3,4, који се убрзавају.
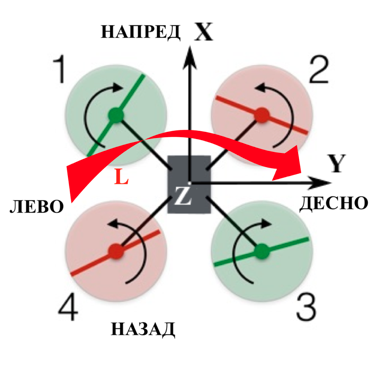
Тако створем уздужни момент M изазива нагињање квадратора дуж уздужне осе X (око Y), за угао Θ (сл. 8). Тада се мења само момент пропињања / понирања. Укупни узгон се подеси исте вредности, као када квадратор лебди, за услов хоризонталног лета, захваљући непромењеном збиру свих узгонских компоненти од потиска сва четири ротора. Асиметричне силе збирног потиска упарених ротора само узрокују да се квадратор уздужно нагне и то је назначено црвеном лучном уздужном стрелицом.Услов за попречни нагиб квадратора под углом φ (сл. 9) је: (T1 + T4) > (T2 + T3). Како се десни мотори успоравају а леви убрзавају, разлика збирних сила узгона коју стварају ротори на левим (1 и 4) и десним моторима (2 и 3) стварају момент ваљања. Тај момент узрокује да се квадратор нагне десно, што је назначено црвеном лучном попречном стрелицом (сл. 9). На овај начин се постиже попречно нагињање квадратора око уздужне X осе за угао φ. Укупни узгон за хоризонтални лет БПЛ-е, задржава се исти као и за испуњење услова лебдења: G = T1 + T2 + T3 + T4.
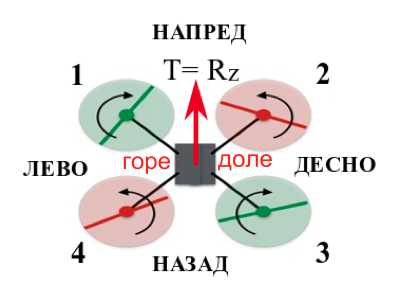
Овим принципом, могуће осетварити правполинијски лет у сва четири смера (сл. 6)
Већина хеликоптера поседује само један главни ротор, тада се реактивни обртни момент створен активним савлађивањем аеродинамичког отпора при кретању кракова ротора, мора поништити. То се решава код хеликоптера малим репним ротором, бочно постављеним на довољном краку од тежишта летелице (репни део). Код квадратора, тај проблем анулирања обртног момента услед савлађивања аеродинамичког отпора ротора решава се системски, са комбинацијом упарених мотора са роторима супротних смерова обртања (2+2).
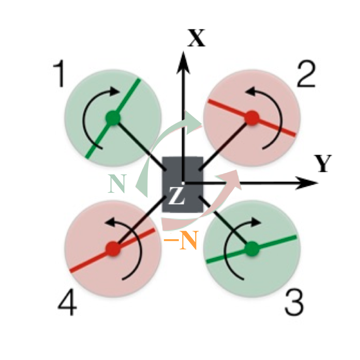
Та техника, уједно се користи и за управљање по правцу, намерним успостављањем дебаланса тих момената, стварањем различитих аеродинамичких отпора ротора услед разлике њихове брзине ротације. Последично, генерише се разлика момената, што изазива скретање квадратора. Ротори који се брже обрћу изложени су већем аеродинамичком отпору, што изазива већи момент око Z осе. Услед успостављене разлике момената, пренете на тело квадратора, исти се закреће у смеру те разлике, односно у смеру обртања бржих ротора. То се постиже повећањем броја обртаја у истом смеру, два упарена (1 и 3) и адекватним смањењем броја обртаја остала два мотора (2 и 4) са роторима (сл. 10). Овај режим лета могуће је извести без нагиба квадратора у било коју страну.
На истој слици приказани су моменти N, око осе Z. Зеленом бојом услед савлађивања аеродинамичких отпора ротора 1 и 3, а црвеном услед 2 и 4. Када су ти моменти изједначени нема скретања, када се брже обрћу зелени ротори, изазивањем већег њиховог аеродинамичког отпора, квадратор скреће десно (у смеру брже ротирајућих ротора), а када се други пар ротора (2 и 4) брже обрћу, квадратор скреће у лево. Када укупни потисак (узгон) остаје непромењен квадратор задржава хоризонтални лет и при скретању по правцу (G = T1 + T2 + T3 + T4). Ове комбинације појединачног подешавања узгона, сваког понаособ ротора, у описаним облицима кретања, постижу се управљањем брзином ротације сваког мотора, појединачно. Резултујући узгон је могуће одржавати константним, за хоризонтални лет, према предходно наведеној једначини. Маневарски лет квадратора остварује се одговарајућом комбинацијом предходно описаних облика кретања.
Архитектура одашиљача за избор различитих облика и фаза лета: лебдење, полетање, слетање, прогресивни лет иманеврисање (сл. 11). Према заданим поставкама, тј. када корисник не додирне екран свога управачког уређаја, БПЛ-а прелази у лебдећи режим лета, где се надморска висина одржава константном, нема промене положаја летелице и угаона брзина јој је стабилизована на нулту вредност. Двоструким кликом на екран, постиже се да летелица прелази у режим за слетање, док је екран осетљив на додир да одреди задате вредности брзине у заданом облику лета.
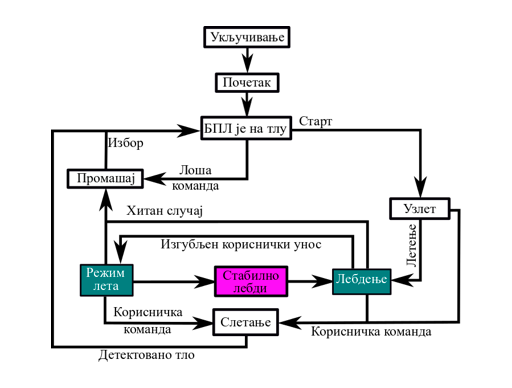
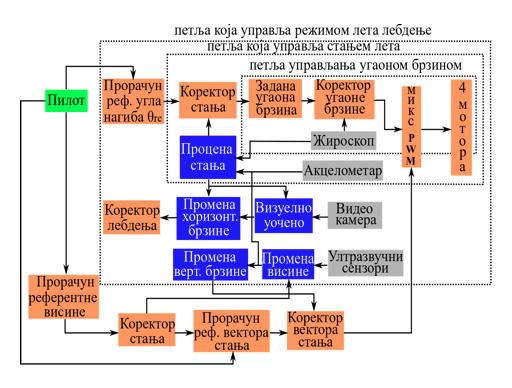
Управљач оператора на земљи (сл. 11) Архитектура фузије података и управљања (сл. 12)
Управљање висином и угаоном брзином одвија се преко затворених петљи. Кроз петље се одређују разлике између задатих и остварених вредности. При поништавњу уошене разлике успостави се захтевани режим лета, од стране корисника. Угаона брзина се прати пропорционалним интегралним управљањем (енгл. proportional integral control PI). У режиму летења задата вредност положаја је од стране пилота (оператора). При лебдењу, задата вредност става је нула. Прелазак из летећег режима у лебдење реализује се задавањем нулте брзине кретања, нулте промене висине и задржавање положаја БПЛ-е, што аутоматски обезбеђује петља управљања у режиму лебдења (сл. 12). Планирање промене режима полази од тренутног стања брзине квадратора, када пилот напусти режим прогресивног, или неког другог тренутног режима лета. Техника генерисања прелазних режима пажљиво је пројектована, тако да прекинут режим нулте брзине и непромењеног положаја је временски кратко (без претераних радњи), а у случају престанка управљања кретањем према напред, одређеном инверзијом.Аутономне летелице без узгонских и стабизационих аеродинамичких површина са роторома, свестране су. Способне су за вертикално полетање, слетање, лебдење, летење унутар врло малих висина и извођењем компликованих маневара. Ова својства чине их погодним за низ различитих примена као што су надзор, патрола бродова, претрага и спашавање итд. Са друге стране, њихове нелинеарности, динамичко купловање, команде лета и решавање стабилности су изазов за пројектанте, стручњаке и научне раднике. Примењене су многе технике управљања за обезбеђење аутономног лета, ове категорије летелица. Недавно је Метода предвиђајућег управљања (енгл. model predictive controlMPC) препозната као потенцијалан у примени код беспилотних летелица са нелинеарном динамиком. Карактеристика предвиђања MPC-а, погодна је стратегија за примену на БПЛ-а, посебно у праћењу путање где се може узети у обзир будућа референтна вредност за побољшање перформанси управљања. Суштински процедура у примени алгоритама MPC, решавање је формулисања проблема оптимизације. За нелинеарни систем, MPC техника углавном захтева да се проблем оптимизације нумерички веома често решава, у веома густим тренуцима узорковања стања, што представља препреку примене у реалном времену, због великог оптерећења и умањене пропусности рачунара. Тако изазвана смањена рачунарска пропусност и повећано кашњење отежава испуњење високих захтева за управљање системима са изразито високом динамиком попут летелица са роторима без фиксних узгонскох и стабилизациских површина.
Извори
- http://folk.ntnu.no/skoge/prost/proceedings/ifac11-proceedings/data/html/papers/3489.pdf
- https://folk.ntnu.no/skoge/prost/proceedings/ifac11proceedings/data/html/papers/2327.pdf
- https://www.design-reuse.com/articles/42705/power-management-for-iot-soc-development.html
- https://www.pce.ac.in/wp-content/uploads/2019/05/ETRX-student-journal-2017-18.pdf, Mihir Kharkar
- https://www.wired.com/2017/05/the-physics-of-drones
- https://www.deltaquad.com/vtol-drones/view/